Введение.
В настоящей статье речь пойдет о беспилотниках, а точнее, об одной уникальной и, на мой взгляд, просто must have модификации для тех, кто любит делать Игру реалистичнее, а также тех, кто искренне не понимает зачем в стоковой Игре нужны спутники, ибо они бесполезны. Статья по сути, есть комбинация перевода
официального гайда разработчика мода с моими комментариями, экстраполяциями, мудростью, почерпнутой из темных глубин темы по RT2 на нашем и забугорном форумах,
описанием на github, да некоторыми
моими личными примерами (введены чисто для иллюстрации - не служат прямым руководством к действию).
Итак,
Remote Tech представляет из себя модификацию для нашего любимого
Kerbal Space Program, существенно усложняющую, приближающую к реальности и вносящую разнообразие в безумно простую, скучную и бессмысленную стоковую программу беспилотного освоения Космоса. Для этого, в Игру вводится понятие связи – любой беспилотный аппарат должен иметь устойчивый канал связи с ЦУП (KSC) или командной станцией (об этом подробнее ниже), иначе управление им становится невозможным. По словам разработчика модификации это компенсирует упрощение пусков беспилотных аппаратов без команды кербонавтов.
[spoiler=Полезная информация.]Данная модификация идеально сочетается с модом kOS, позволяющим на специальном скриптовом языке (напоминающем Си) писать программы автопилотирования и навигации для крафтов, снабженных беспилотным модулем. При наличии подобной программы беспилотник может работать автономно и при отсутствии канала связи с KSC. В общем мечта Джорджа Буша младшего.[/spoiler]
Первые шаги.
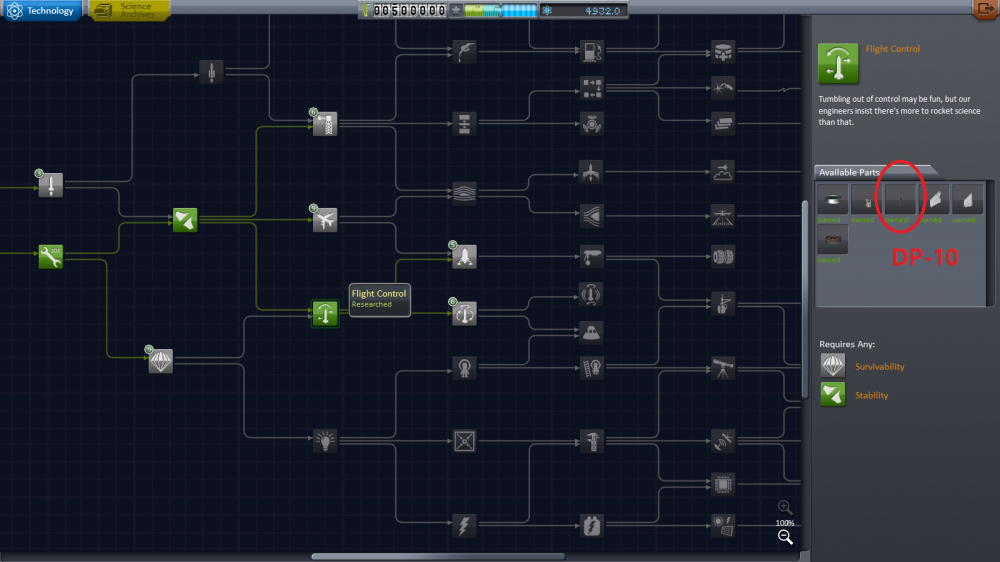
1.) Для начала вам, как бы странно это ни звучало, потребуется антенна. Если вы не меняли стоковое дерево науки, то самая первая доступная антенна находится на 3-ем уровне научных исследований во вкладке «Flight Control» («Управление полетом»), называется она Reflectron DP-10, имеет стоимость в 60 кербаксов за штуку и обладает радиусом эффективной связи (радиусом действия) в 500 км. от KSC или ретранслятора по прямой видимости. По умолчанию активна, но можно выключить через контекстное меню. Стоит отметить, что все антенны в RT в активном состоянии постоянно потребляют электроэнергию (в стоке, как мы помним, энергия потребляется лишь в момент передачи каких-либо данных), так что не забывайте об аккумуляторах и источниках возобновления запасов электричества на корабле. В частности, DP-10 необходимо 0,01 единиц энергии в секунду.
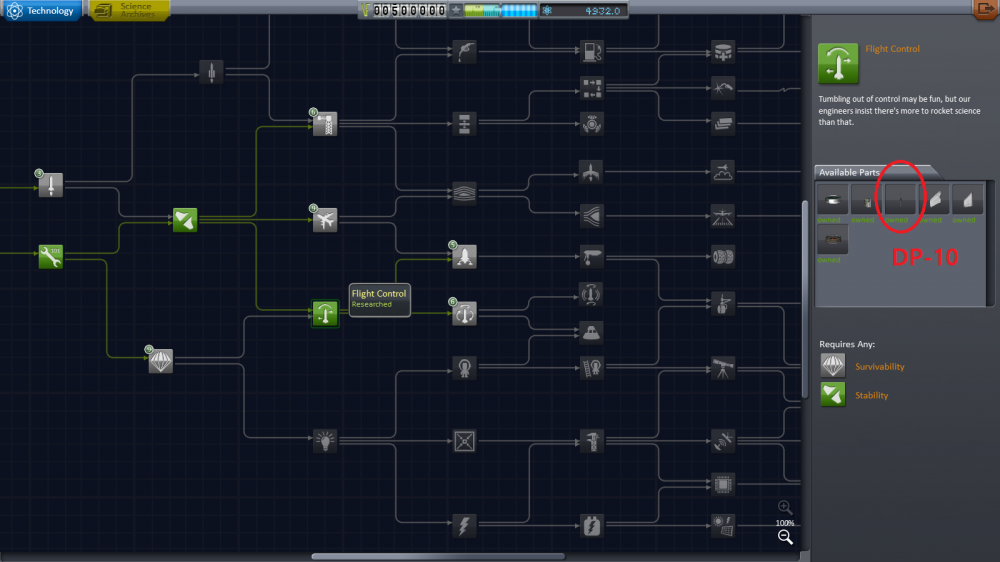
[spoiler=Полезная информация.]Помните, что антенны довольно хрупкие штуки и длинный штырь гибкой Communotron 16 легко оторвет набегающим потоком воздуха, а вот плоская DP-10 выдержит атмосферный разгон с легкостью (главное чтоб не отгорела :) ). Вот только ей может не хватить радиуса действия… Как всегда, нужно находить компромиссы и различные технические решения, от узконаправленных антенн тарельчатого типа, до ретрансляторов, фэйрингов и проч.[/spoiler]
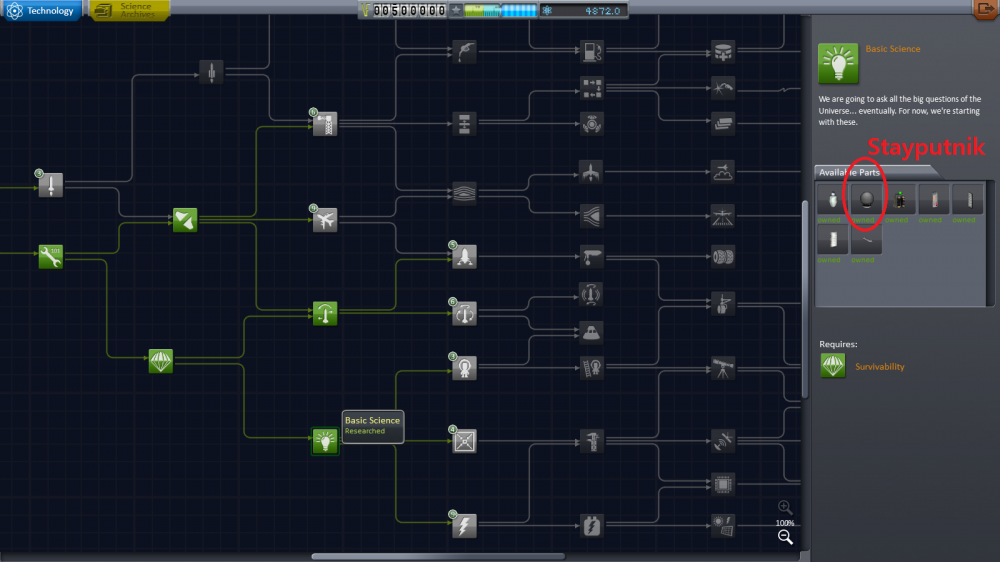
2.) Но кроме антенны, как вы понимаете, нужен еще и беспилотный модуль – собственно тот самый, дистанционно управляемый модуль-дрон, что «дергает за ниточки» сервомоторы нашего корабля. Самый простой – Stayputnik – можно найти в соседнем разделе «Basic Science» («Научные основы»). Стоимость 300 кербаксов за штуку, потребляет 1.7 единиц энергии в минуту (при конструировании корабля, обратите внимание на то, что у разных деталей потребление электричества зачастую указано для разных промежутков времени. Учтите это при расчете запасов и выработки электроэнергии), обладает встроенным аккумулятором в 10 единиц электроэнергии и простейшим автопилотом удержания направления.
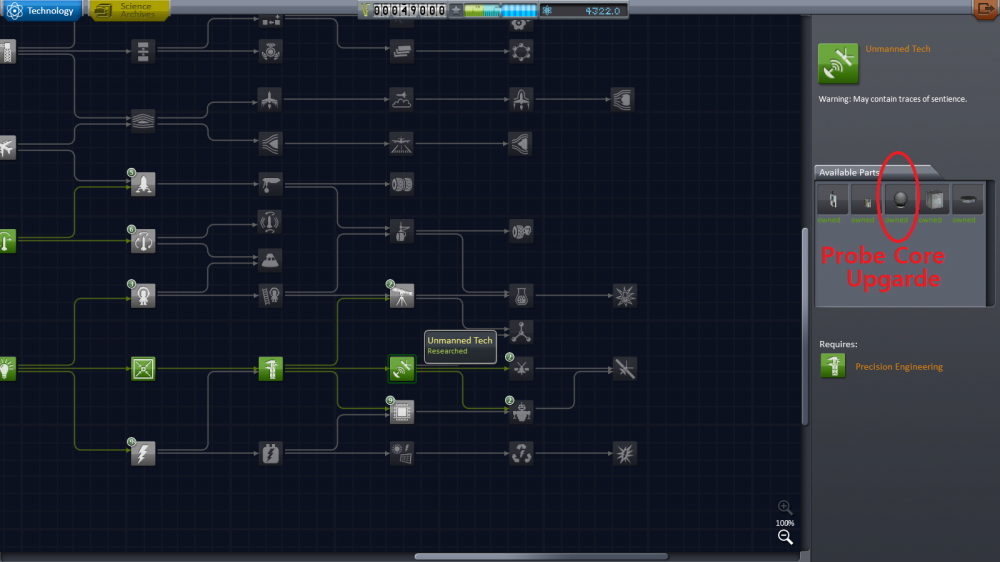
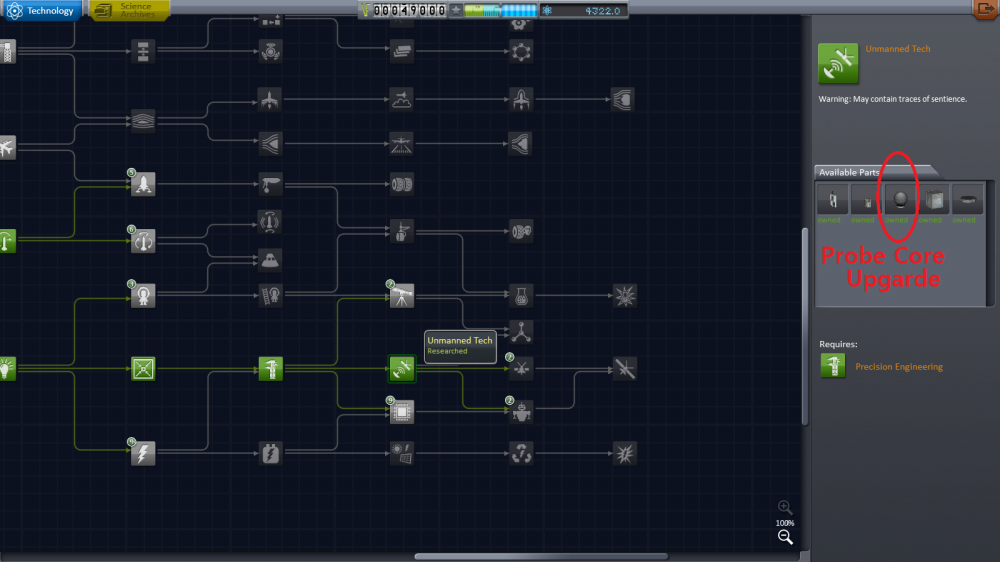
[spoiler=Полезная информация.]Немного забегая вперед. Впоследствии, когда ваша наука выдвинется на передовые рубежи, а мысль пронзит пространство!... В общем на 6 уровне науки (тот где все по 300), в разделе «Unmanned Tech» («Беспилотные технологии») можно будет открыть перк «Probe Core Upgrade», что позволит добавить во все модули-дроны встроенную всенаправленную (подробнее о всенаправленных и узконаправленных антеннах читайте ниже в разделе "Антенны") антенну, радиусом эффективной связи в целых 3 км. Так что вы без проблем сможете строить беспилотные самолетики и кружить над KSC безо всяких антенн. Надо сказать эта фишка все же имеет практическое применение, к примеру, если запуск спутника осуществляется пилотируемой миссией (ну или беспилотной, сопровождая спутник до целевой орбиты или пункта назначения) и по замыслу (из соображений экономии денег или массы) в его конструкции антенна не предусмотрена. Первые маневры после отстыковки спутника можно будет осуществить без проблем. Но в дальнейшем, для маневрирования им, вам придется подогнать к спутнику корабль-ретранслятор.
 [/spoiler]
[/spoiler]
3.) Для дальних странствий, вашему кораблику потребуются антенны повышенной мощности, типа раскладных Communotron 16 или Comms DTS-M1 (самая доступная из узконаправленных). Для активации антенн вам их придется разложить (хотя вы, естественно, можете сделать это еще в ангаре. Однако не рекомендую, есть небольшой шанс, что отломятся при загрузке крафта), причем следует учесть, что делать это нужно на высоте, где сопротивление атмосферы при ее прохождении кораблем не сможет им повредить. А в случае с DTS-M1, ее еще нужно будет нацелить через контекстное меню.
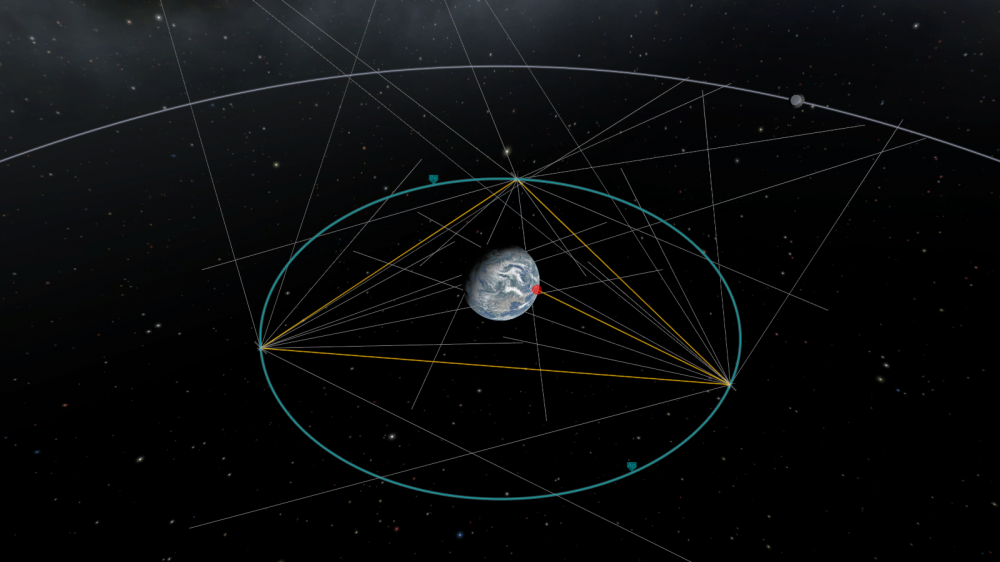
4.) Как только вы наплодите ваших беспилотных посланников, вам потребуется расположить в системе группировку спутников (некоторые наземными станциями балуются. Так тоже можно, но я не приверженец) релейной – ретрансляторной сети, для поддержания устойчивой связи между KSC и разлетающимися по всей системе спутниками.
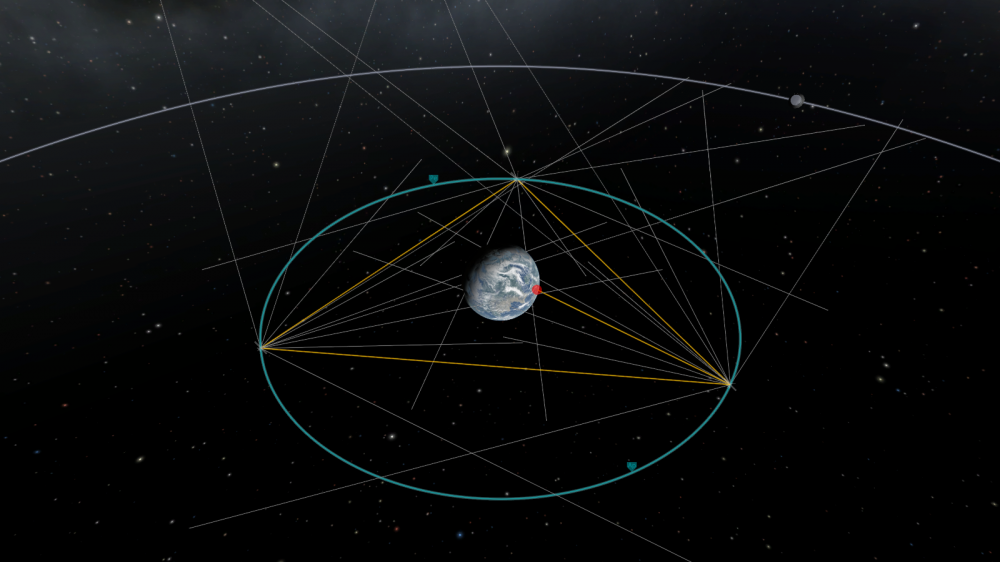
[spoiler=Полезная информация.]Планируйте релейные сети заранее, во избежание «затенений» (зоны без связи. Образуются по разным причинам – недостаточный радиус антенн релейной сети, перекрытие прямой видимости объекта крупным небесным телом, неверный выбор антенны – например одна направленного типа, указывающая на конкретный объект узким лучом и не захватывающая соседние объекты), экономических потерь на дополнительные запуски новых спутников или запчастей для старых, корректировку орбит, ненужного геммороя.
 [/spoiler]
[/spoiler]
Антенны.
В модификации представлено два типа антенн: «Тарелки» - узконаправленные, связь устанавливает с конкретным объектом, выбираемым через контекстное меню и в пределах узкого конуса, идущего по направлению к этому объекту. Чем больше радиус действия антенны, тем меньше основание конуса и «Всенаправленные» (Омни): работают со всеми объектами, попадающими в сферу действия данной антенны.
Тарелки
Этот тип антенн должен быть вручную через контекстное меню направлен на нужный объект. Обычно они обладают большим радиусом действия, но направлены лишь в сторону целевого объекта, что делает их отличным выбором для систем дальней связи. Физически в сторону цели разворачивать их не нужно – тут модификация дает нам поблажку. Как мы помним, такие антенны могут обеспечивать связь в зоне узкого конуса, направленного в сторону цели. Если подобную антенну направить в целом на луну или планету, то любой рукотворный объект, попадающий в этот конус, может иметь канал связи с тарелкой (при наличии собственной антенны достаточной мощности, разумеется).
Всенаправленные (Омни)
Этот тип антенн излучает и принимает сигнал во все стороны с равным усилением, так что вам нет необходимости настраивать их направление. Их радиус действия значительно меньше, чем у большинства тарелок, однако они идеально подходят для связи орбитальной группировки конкретного тела.
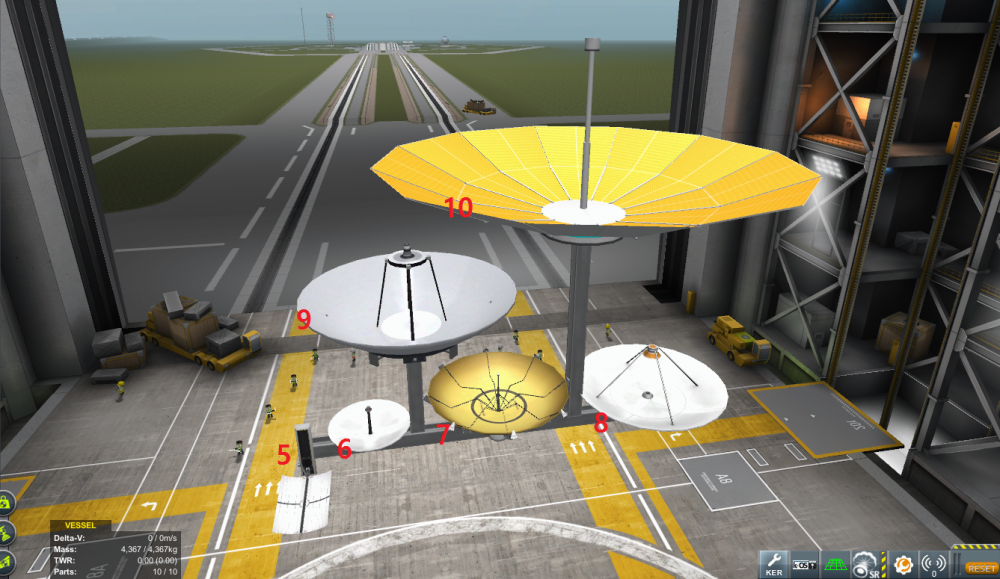
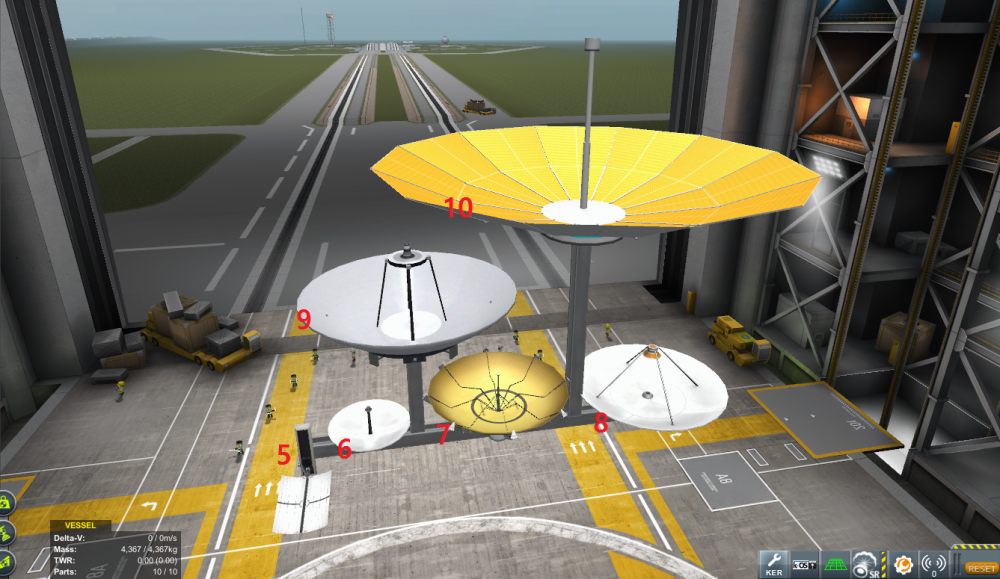
[spoiler=Список доступных антенн и их характеристики]Омни-класс1 Reflectron DP-10 масса: 0,005 тонн, темп.предел: 1200, радиус: 500 км, питание: 0,01 ед.э/с, цена: 60 $, активна по умолчанию.
2 Communotron 16 масса: 0,005 тонн, темп.предел: 2000, радиус: 2,50 Мм, питание: 0,13 ед.э/с, цена: 300$, ломается в атмосфере3 CommTechEXP-VR-2T масса: 0,02 тонн, темп.предел: 1200, радиус: 3,00 Мм, питание: 0,18 ед.э/с, цена: 400$, ломается в атмосфере4 Communotron 32 масса: 0,01 тонн, темп.предел: 3000, радиус: 5,00 Мм, питание: 0,60 ед.э/с, цена: 600$, ломается в атмосфере
Класс "тарелок"
5 Comms DTS-M1масса: 0,03 тонн, темп.предел: 2000, радиус: 50,0 Мм, питание: 0,82 ед.э/с, угол: 45, цена: 600$, ломается в атмосфере6 Reflectron KR-7 масса: 0,5 тонн, темп.предел: 1200, радиус: 90,0 Мм, питание: 0,82 ед.э/с, угол: 25, цена: 800$, 7 Communotron 88-88 масса: 0,025 тонн, темп.предел: 2000, радиус: 40,0 Гм, питание: 0,93 ед.э/с, угол: 0,06, цена: 1100$, ломается в атмосфере8 Reflectron KR-14масса: 1,0 тонн, темп.предел: 1200, радиус: 60,0 Гм, питание: 0,93 ед.э/с, угол: 0,04, цена: 2000$, 9 CommTech 1масса: 1,0 тонн, темп.предел: 2900, радиус: 350,0 Гм, питание: 2,60 ед.э/с, угол: 0,01, цена: 9500$, 10 Reflectron GX-128 масса: 0,5 тонн, темп.предел: 2900, радиус: 400 Гм, питание: 2,80 ед.э/с, угол: 0,01, цена: 11000$, ломается в атмосфере
 [/spoiler]
[/spoiler]
[spoiler=Полезная информация.]В KSC установлено несколько тарелок, что могут «вести» множество различных целей (настраиваются автоматически, тыкать вручную не нужно) в радиусе до 75 Мега метров. По сути, KSC представляет собой одну большую Омни антенну с радиусом эффективной связи в 75 Мм. Минмус, к примеру, обращается вокруг Кербина по круглой орбите в 47 Мм. высотой. Сфера влияния (SOI) Кербина составляет 84.16 Мм. Т.е. до Минмуса антенны KSC «добьют», но если вы хотите запускать беспилотные миссии за пределы SOI Кербина, вам придется строить сеть ретрансляторов с антеннами большего радиуса действия. [/spoiler]
Задержка сигнала
Так как система Кербола обладает значительно меньшими размерами, чем наша с вами солнечная система, для симуляции "реалистичной" задержки сигнала, электромагнитные волны в RT обладают скоростью меньшей, чем скорость света, что обеспечивает «реалистичную» задержку сигнала (время получения ответа оператором от дрона).
[spoiler=Полезная информация.]Если хотите, вы можете отключить задержку сигнала в файле настроек, что будет автоматически создан при первом запуске Игры с данной модификацией. В папке мода файлик RemoteTech_Settings.cfg, в строке EnableSignalDelay = True, True заменить на False.
А еще вы можете поиграться со значением скорости света))). Допустим вы хотите «слегка» уменьшить задержку сигнала.
Тогда укажите значение скорости света 6Е+08 – задержка сигнала уменьшится в 2 раза
Еще уменьшить? 3Е+09 – в 10 раз меньше. 3Е+10 – в 100 раз. [/spoiler]
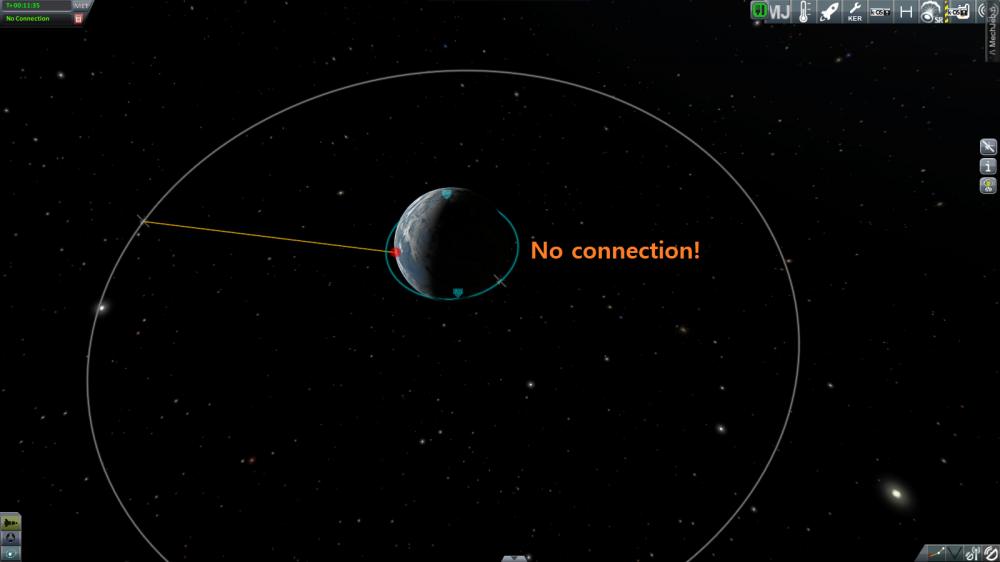
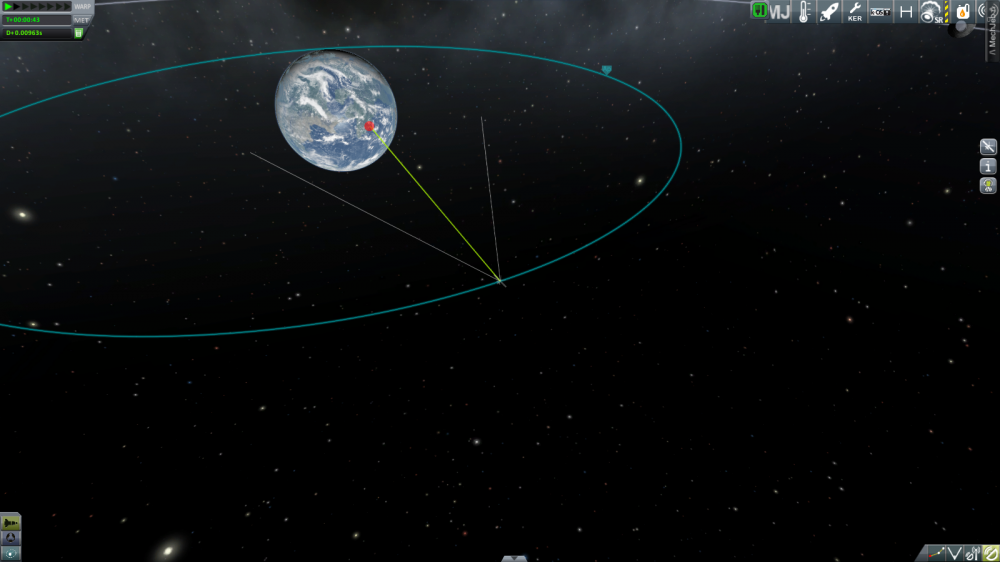
Каналы связи
Наличие канала связи означает возможность командного центра (KSC или командной станции) передать управляющий сигнал адресату. Данный канал связи может быть не прямым, а быть передан через спутники-ретрансляторы опосредованно. Связи между отдельными такими спутниками в рамках терминологии мода именуются линками (links). Чтобы установить связь-линк между двумя отдельными узлами релейной сети, оба узла должны иметь на борту антенны достаточного радиуса (а в случае узконаправленных антенн, либо направлены непосредственно друг на друга, либо находиться в конусе связи тарелок). Соответственно, чтобы между командным центром и целевым беспилотным аппаратом был установлен канал связи, необходимо, чтобы от командного центра до цели прямо или опосредовано через ретрансляторы была проведена непрерывная цепь линков.
Процессор (обработчик) сигнала
Этим замысловатым термином в рамках модификации обзывается любой модуль, что может принимать сигнал от командного центра – в частности любой стоковый беспилотный модуль. Управлять процессором вы можете только тогда, когда между ним и командным центром установлен канал связи. Кроме того, на больших расстояниях от командного центра (свыше SOI Кербина) помните о задержке сигнала – команды будут выполняться не сразу. Однако, в процессоре также есть небольшой полетный компьютер, что может быть настроен на выполнение простых задач во время перебоев связи.
Полетный компьютер
Пожалуй самая сложная и интересная часть Remote Tech! Отправляя свой беспилотный аппарат исследовать космические просторы, вскоре вы обнаружите, что управлять кораблем становится все сложнее из-за возросшего времени отклика. А уж посадка, даже на близлежащую Дюну, когда от вас требуется незамедлительная реакция на ситуацию, а дрон реагирует лишь спустя пару минут, в 90% будет зафейлена. На этот случай в каждый беспилотный модуль в RT установлен простой и незамысловатый, но функциональный автопилот, именуемый «Flight Computer» («Полетный компьютер»).

Найти его можно, тыкнув по маленькой зеленой иконке калькулятора в левом верхнем углу экрана, прямо под указателями варпа и даты. Само окошко Компьютера можно условно разделить на две части: слева кнопки и пиктограммы для задания программ, справа выводятся данные о текущих маневрах (если навести указатель мыши на любую из кнопок или окошек – через пару мгновений всплывет пояснение, о назначении и использовании этого элемента). Чтобы открыть правую часть Компьютера, щелкните кнопку «>>» в правом нижнем углу окошка.
Самый элементарный способ применения – как обычно на орбитальной карте создать маневр, затем щелкнуть в Компьютере кнопку NODE – это развернет нос корабля в направлении узла маневра. Затем, щелкнуть EXEC, что даст команду Компьютеру на выполнение прожига выбранного маневра в указанное время и с указанной длительностью. Двигатель при этом должен быть запущен (тяга на нуле, естественно), ну или предварительно нужно дать команду компьютеру на запуск движка перед прожигом.
Чтобы было понятнее, как работает сия забавная штука, предлагаю рассмотреть работу Компьютера на примере посадки на планету. Стоит отметить, что хотя RT самодостаточен, какой-либо информационный мод (например Kerbal Engineer Redux, VOID или MechJeb) значительно упростит навигацию и планирование. RealChutes и SmartParts позволят заменить условия срабатывания парашютов просто по времени, на триггеры по заданной высоте.
Итак. Даже в упрощенной физической модели KSP посадка достаточно сложный процесс, требующий определенных навыков пилотирования. Чуть раньше необходимого включил двигатели, слегка перерасходовал топливо и не хватило для торможения до безопасной скорости, чуть запоздал с парашютами… Посадка обязывает пилота принимать быстрые и верные решения в реальном времени. А RT не очень-то позволяет игроку летать в реальном времени.
Посадка на атмосферные тела, конечно, проще. В нужное время выпустил парашюты и уповай на то, что инженер правильно рассчитал их количество. Так что с такой посадкой автопилот RT справляется без проблем.
Начнем. Мы на низкой орбите Кербина, у нас в руках небольшой беспилотный аппарат, связь с ним осуществляется через спутниковую сеть, но на аппарате установлены только Comms DTS-01, а значит при входе в атмосферу в активированном состоянии их оторвет. Придется антенны сложить, но в любом случае у нас возникнет потеря связи. Определяем, куда собираемся приземляться, устанавливаем точку маневра. Щелкаем NODE, а затем EXEC. Видим, что в окошке Компьютера появилось выполнение маневра и бежит счетчик времени до прожига (кстати, в нижней левой части интерфейса Компьютера, есть ползунок тяги, коим можно регулировать уровень тяги при выполнении маневра, а также окошко, в которое можно вбить конкретное значение дельты, что мы хотим прожечь. В нашем случае просто выставляем тягу на 100%).

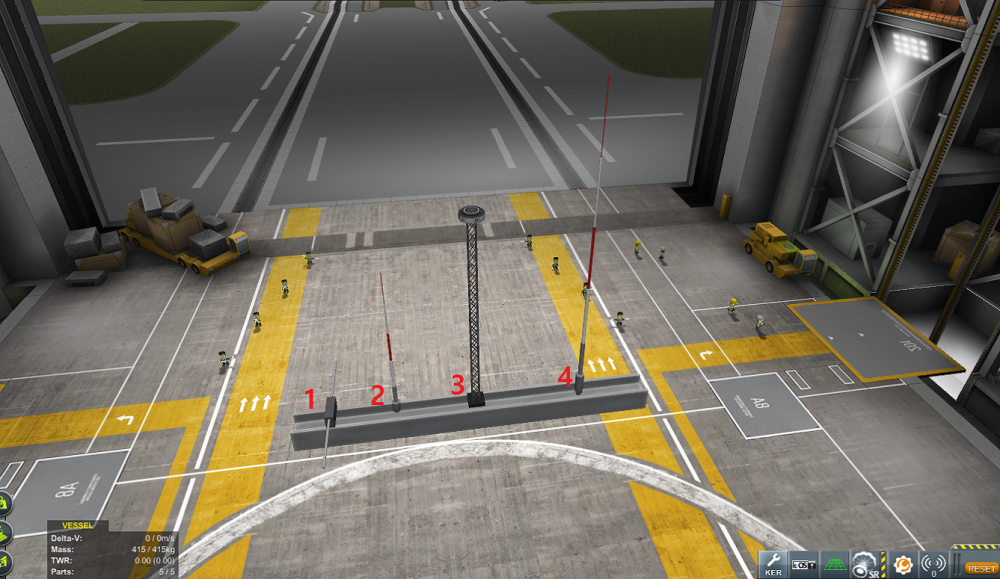
После завершения прожига, нужно отстрелить бак с двигателем, закрыть антенны и солнечные панели, чтобы не оторвало в атмосфере, а также развернуть кораблик щитом вниз. Для этого в RT есть возможность выставить конкретную задержку выполнения действия. В правой части интерфейса, в правом нижнем углу есть небольшое окно. Вписываем туда требуемое время задержки. Допустим до маневра осталось 4 минуты. Прожиг займет около 10 секунд. Ну и прибавим секунд 30 для перестраховки. Значит в этом окошке нужно указать задержку в 280 секунд (проще вписать 4m40s – где s - секунды, m – минуты, h – часы, d – дни, w – недели, y – годы. Как выставить месяц, я не нашел. Обозначение секунд «s» указывать не обязательно. Время задержки и операции в самом Компьютере можно делать на паузе), жмем Enter. Таким образом мы установили время задержки до любой следующей команды, что мы прикажем. Это может быть включение следующей стадии, активация через экшн группу, например, раскладки солнечных панелей, включение SAS, или изменение удержания вектора. Отстрел бака и складывание деталей лучше нужно разместить на экшн группах в ангаре. В тестовом примере это 2,3,4. Последовательно нажимаем кнопки экшн групп и видим, как в интерфейсе Компьютера появляются соответствующие задачи, с выставленной задержкой в 4 минуты 40 секунд. При этом сами действия в реальном времени не происходят.

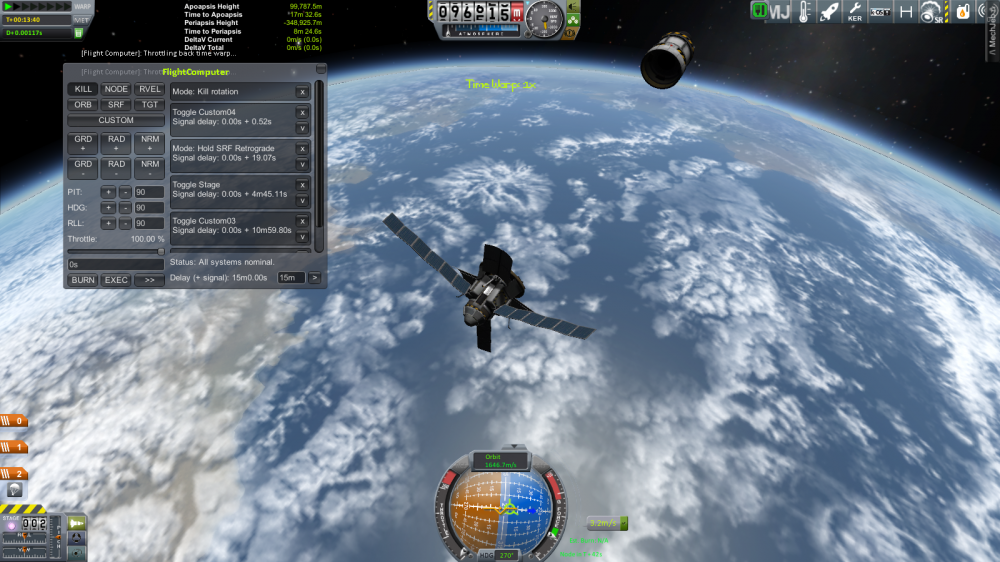
Осталось задать команду на разворот кораблика щитом в ретроград. Для этого в Компьютере есть целая панель кнопочек. Как вы видите на скрине, в интерфейсе слева есть 6 кнопок с непонятными аббревиатурами и знаками +/-, длинная кнопка Custom, а ниже еще три строчки, с возможностью вписать какие-то цифры. Это аналог стокового SAS - удержания векторов.
GRD+ - проградный вектор
GRD- - ретроградный вектор
RAD+ - радиальный вектор
RAD- - обратно радиальный вектор
NRM+ - нормальный вектор (сорри за название, не знаю как они зовутся по-русски)
NRM- - обратно нормальный вектор
Custom - возможность ручной настройки конкретного направления по трем осям в пределах 360 градусов. Здесь лучше поэкспериментировать, чтобы понять, какая ось соответствует какому направлению в игре. Как это адекватно объяснить на словах в статье я не придумал. Соответственно три нижних строчки как раз за это и отвечают.
Но ведь, резонно скажете вы, направление, например, в проград относительно поверхности планеты и, скажем, относительно орбиты - есть разные вещи? Все верно. Для этого, над кнопкой Custom есть еще четыре кнопки: RVEL - отсчет относительно скорости цели, ORB - отсчет относительно орбитальной скорости, SRF - относительно планеты, TGT - проград направлен точно в цель, соответственно. По умолчанию выставляется значение ORB, так что его нужно переключить на нужное по желанию. Раз уж мы описываем кнопки, на панели еще осталась кнопка KILL - это аналог удержания направления (левый верхний "кружочек") стокового SAS. Гасит любые колебания крафта.
Итак нам нужно развернуться по ретроградному вектору (задержку пока не трогаем, пусть разворот произойдет после того, как сработают все предыдущие команды). Щелкаем "SRF", а затем "GRD-". В Компьютере появилась запись с командой на удержание ретроградного вектора, относительно поверхности планеты.

Основная сложность - определить время выпуска парашютов, чтобы их не оторвало на слишком высокой скорости, и они не сгорели в атмосфере. Определить это можно, классическим экспериментальным методом тыка, или рассчитать, но в рамках этого руководства подробно останавливаться на этом не будем. Допустим мы уже знаем (я произвел посадку по той же траектории вручную), что по выбранной нами траектории, с удержанием ретрограда, после завершения прожига, аппарат совершит литоторможение (долбанется о поверхность) через 7 минут. При этом парашюты можно открыть через 5 минут. До маневра осталось чуть меньше 4 минут, значит выставляем задержку в 9 минут. Щелкаем "Пробелом" - и таким образом забиваем в Компьютер команду на раскрытие парашюта через 9 минут от текущего момента.

Осталось запрограммировать раскрытие солнечных панелей и антенн после посадки - мы же не хотим остаться без связи на земле? Можно добавить к 9 минутам еще одну, чтобы раскрытие произошло еще в воздухе, но уже на безопасной скорости менее 100 м/с вертикальной составляющей. А можно накинут минут 5 сверху, дабы быть точно уверенными, что ничего не отломается. Ставим задержку в 15 минут, нажимаем 3,4 и идем просветляться пить чай! Весь остальной путь наш беспилотник пройдет в автоматическом режиме, руководствуясь заложенными в него этапами, даже когда он сложит антенны и останется без связи.

Следует учесть, что все вышеописанное - лишь пример применения Полетного компьютера. Его реальная сфера использования безгранична - от автоматического беспилотного разворачивания релейной сети в условиях остсутствия связи, до работ по подготовке "почвы" перед прилетом пилотируемых миссий. Если что-то осталось непонятно (я чувствую, что объяснение вышло довольно сумбурным, да и формат скриншотов не очень подходит) обращайтесь ко мне в личку или на форум с вопросами, постараюсь ответить более конкретно.
Командные станции
Для сверхдальних миссий, задержка сигнала зачастую становиться критичной, или просто перестает хватать дальности антенн ретрансляторов. В этих случаях RT предлагает направить в предполагаемый район действий беспилотных аппаратов Командную станцию. И это довольно-таки интересная и сложная задача.
Командные станции позволяют работать с беспилотниками без задержки сигнала, которая может достигать нескольких минут, если связываться с KSC. Однако науку из полевых исследований, Командная станция генерировать не может – для этого вам все равно потребуется установление связи с KSC (ну или тащить станцию на Кербин). В состав командной станции должен входить один специальный командный модуль «Remote Guidance Unit RCL-01», обладающий всеми особенностями хорошего стокового беспилотного модуля и неплохим встроенным гиродином, а также 6+ членов экипажа.
Режимы связи
В RT есть несколько... ну, скажем, два... режима связи, в которых может работать модификация. Подробнее о смене режима ниже, в описании файла настроек.
По умолчанию RT работает в стандартном режиме (Standart). Упрощенно: есть два корабля. На одном установлена тарелка Reflectron KR-7 (радиус связи – 90 Мм.), направленная на второй корабль, на котором расположена Омни Communotron 32 (радиус связи – 5 Мм.). Так вот в режиме Стандарт связь между двумя кораблями можно установить, если расстояние меж ними меньше, чем радиус действия слабейшей из антенн, т.е. в данном случае

 [/spoiler]
[/spoiler]
 [/spoiler]
[/spoiler]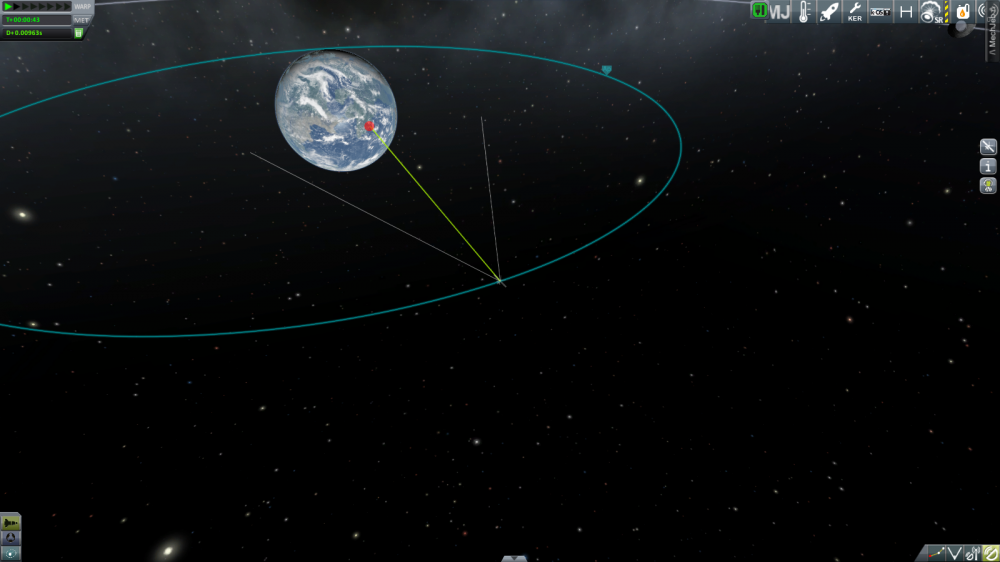

 [/spoiler]
[/spoiler]












 Silver
Silver




