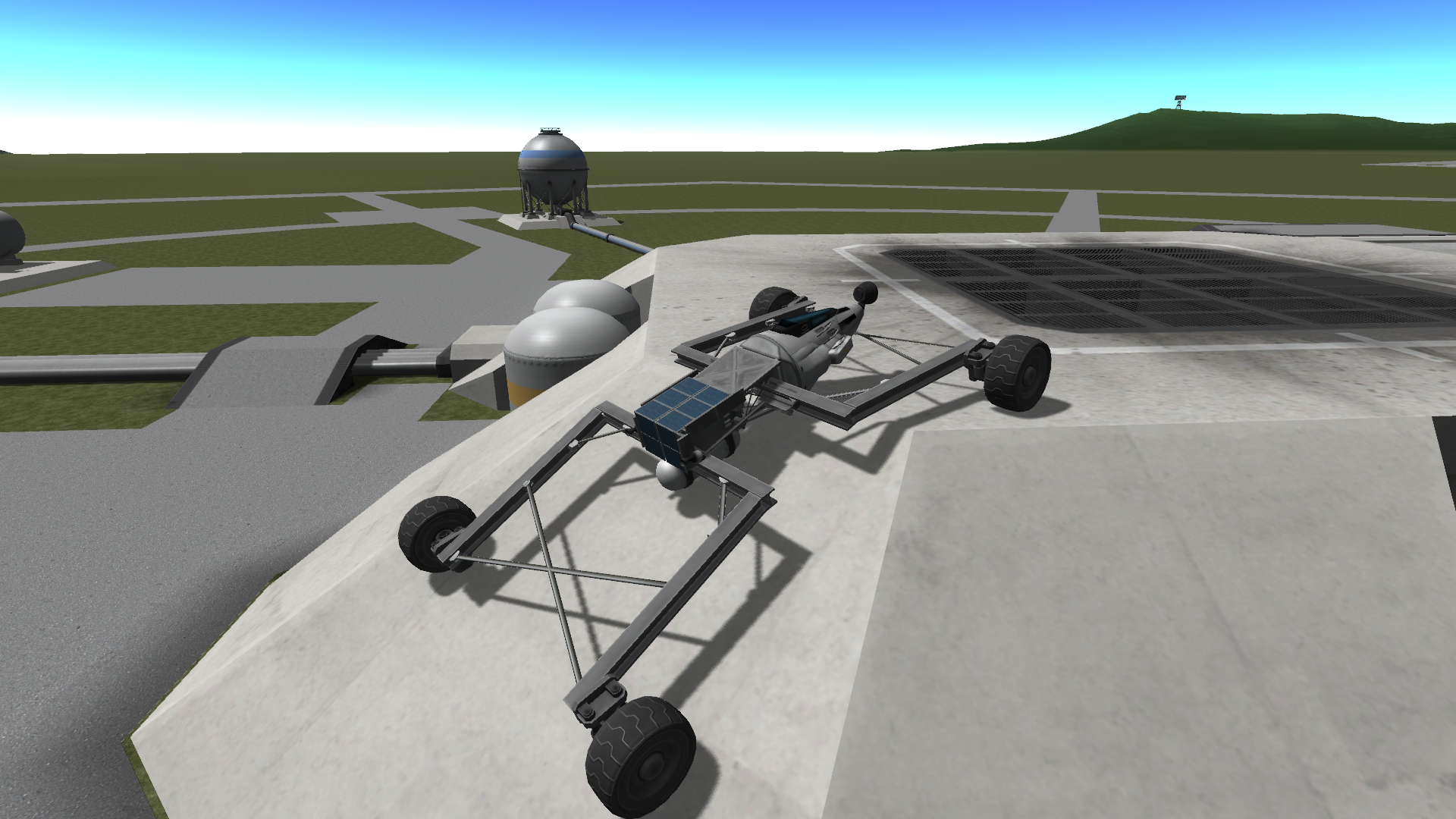
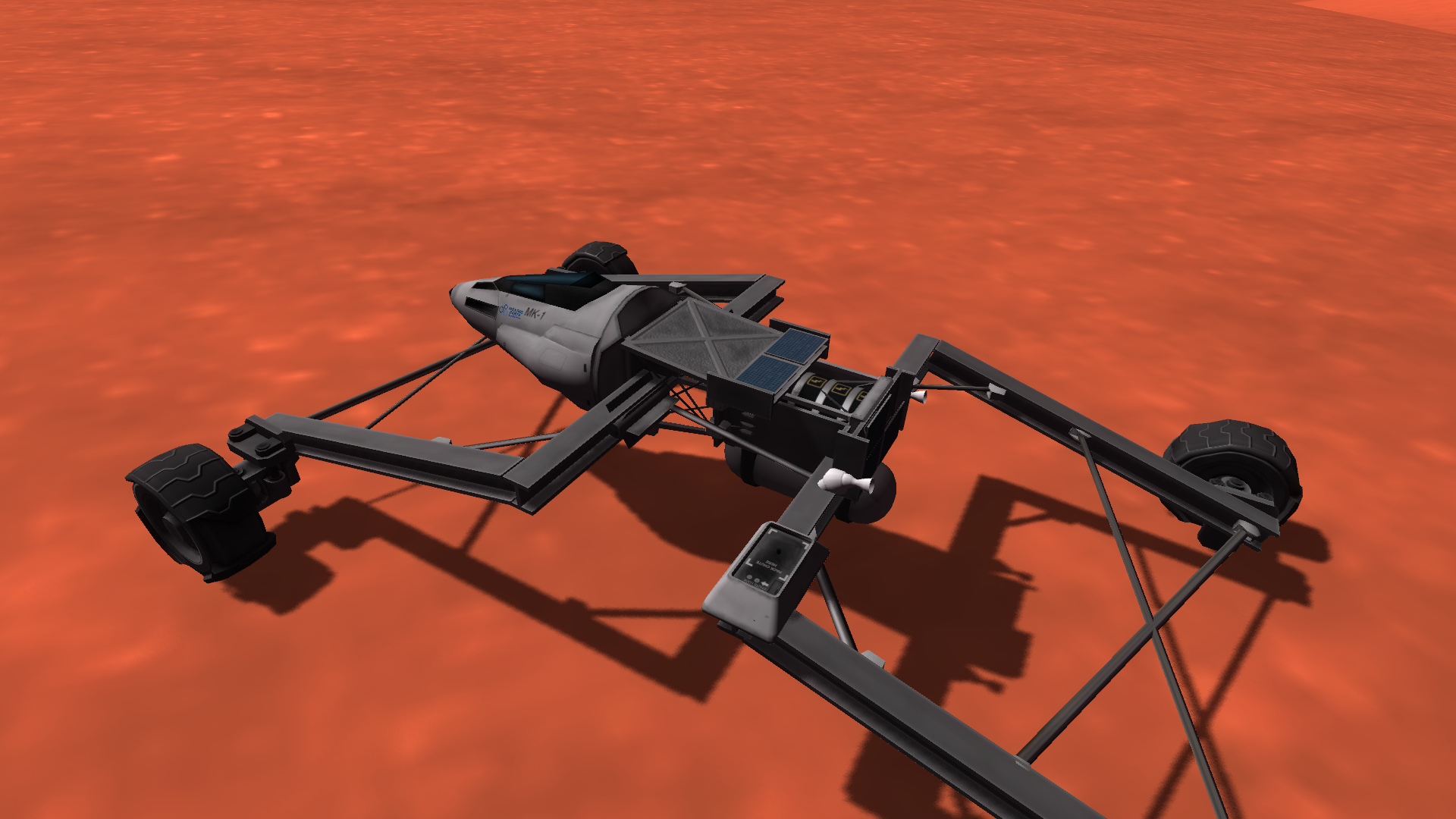
Собран полностью из стоковых деталей. Весит 5.54 t. Деталей немного, виснуть не будет.
При разработке к роверу мною предъявлялись следующие требования:
- высокая скорость;
- хорошая управляемость;
- безопасность.
Что из этого вышло:
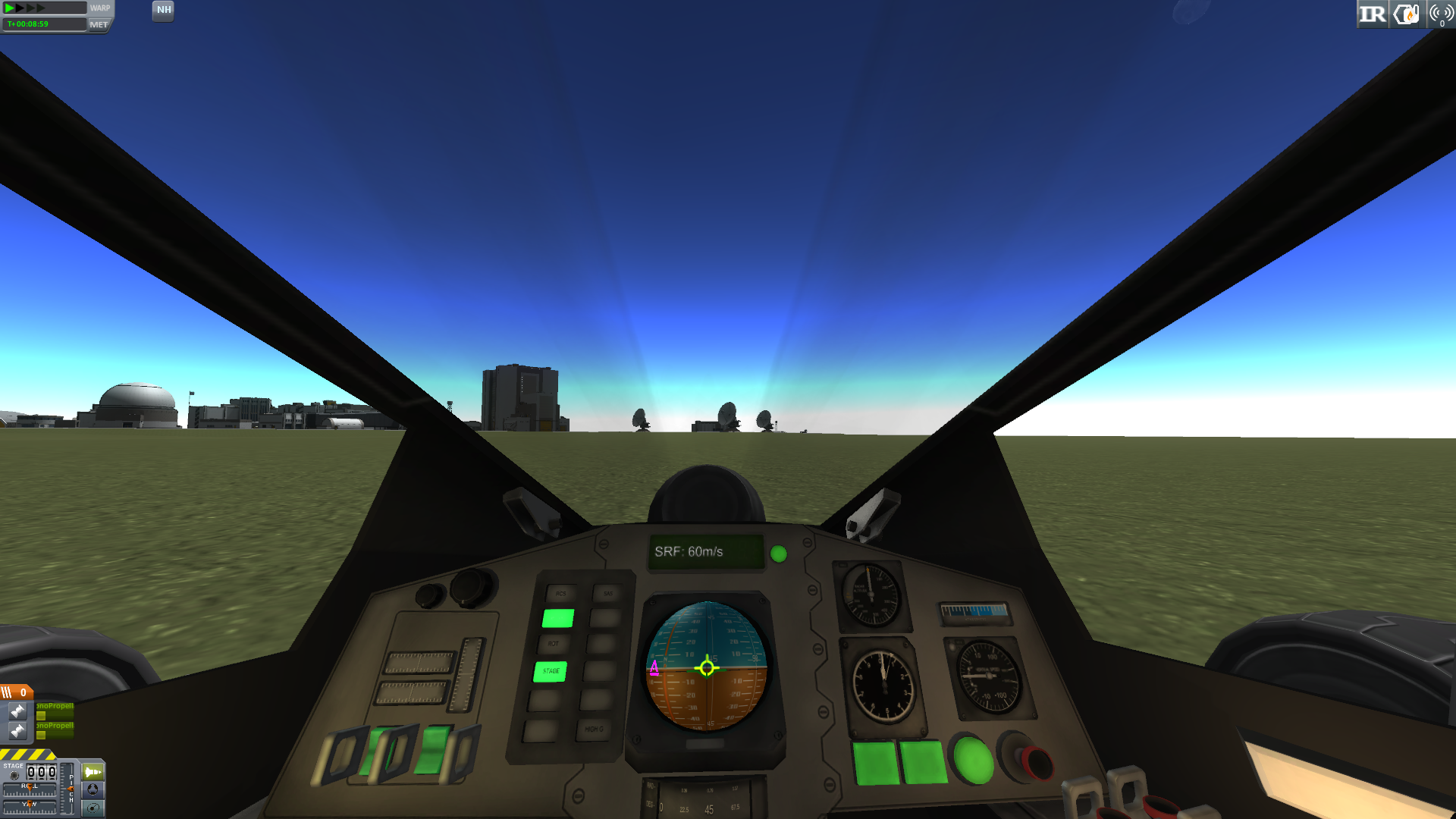
- скорость на электродвигателях небольшая - всего 23 m/s. Дабы преодолеть это недоразумение, добавил 2 небольших двигателя, работающих на монопропилене. Максимальная скорость возрасла до 60 m/s (Дальше - лопают колеса);
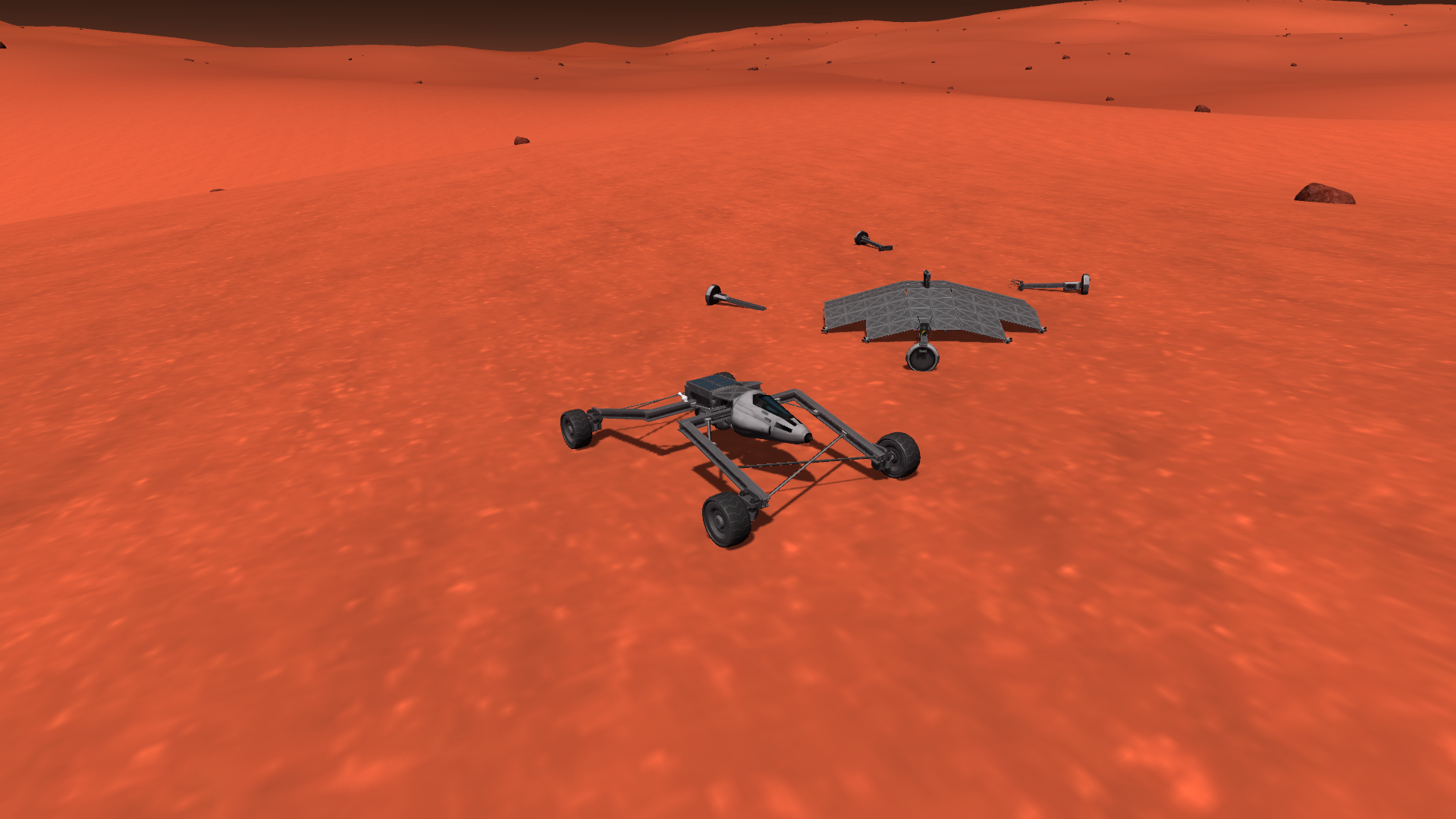
- управляемость получилась хорошая, способен заходить в резкие повороты (~44 m/s), на более высоких скоростях выжимать до упора влево\вправо не стоит;
- а вот с безопасностью не все так просто: с одной стороны он не склонен к переворачиваниям и может выдержать сильные удары о землю, если падает на колеса, с другой - если он все же падает не на колеса, есть риск взорвать кабину (остальные части остаются целыми, за исключением мелочей вроде солнечных панелей)(если поставить вместо кабины беспилотный модуль, или кресло для кербанавта - проблема отпадает).
Рекомендую управлять с видом из кабины - незабываемые впечатления.
При разработке к роверу мною предъявлялись следующие требования:
- высокая скорость;
- хорошая управляемость;
- безопасность.
Что из этого вышло:
- скорость на электродвигателях небольшая - всего 23 m/s. Дабы преодолеть это недоразумение, добавил 2 небольших двигателя, работающих на монопропилене. Максимальная скорость возрасла до 60 m/s (Дальше - лопают колеса);
- управляемость получилась хорошая, способен заходить в резкие повороты (~44 m/s), на более высоких скоростях выжимать до упора влево\вправо не стоит;
- а вот с безопасностью не все так просто: с одной стороны он не склонен к переворачиваниям и может выдержать сильные удары о землю, если падает на колеса, с другой - если он все же падает не на колеса, есть риск взорвать кабину (остальные части остаются целыми, за исключением мелочей вроде солнечных панелей)(если поставить вместо кабины беспилотный модуль, или кресло для кербанавта - проблема отпадает).




Рекомендую управлять с видом из кабины - незабываемые впечатления.
-
 Elk
Elk - 25 окт 2014 в 22:11
- 2 370
- 4
Rover "BOX 38.2/A"
27 фев 2014 в 00:46,
СУ-67 "Гагарин"
15 сен 2013 в 09:12,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (январь2024)
Ребят, если что - есть такая удобная штука для автоматического параллельного импорта ;)
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (январь2024)
ага, а я-то думаю, чё на параллакс обновлений нет...
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (январь2024)
конечно, скидывай новую версию, как минимум мне, точно пригодится)

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (январь2024)
Планируется ли актуализация сборки? Купил патреон параллакса, могу поделиться, там как раз 1

ShineFix - мод для починки всех отражений и флагов в игре
Микроапдейт. Вышел 1.0.1, я пофиксил ненормальное отражение батарей.

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума



Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt