Гайд по стыковке
» Гайды
Добрый день,
В настоящем руководстве будет детально рассмотрен процесс стыковки космических аппаратов на конкретных примерах.
Оглавление
1. Предисловие.
2. Системы управления КА.
a. SAS и ASAS.
b. RCS.
3. Требования к конструкции КА.
4. Сборка корабля.
5. Запуск кораблей.
6. Сведение орбит (догонялки).
a. Сведение круглых орбит.
b. Сведение эллиптических орбит вариант 1.
c. Сведение эллиптических орбит вариант 2.
d. Резюме.
7. Стыковка.
a. Относительные движения аппаратов.
b. Стыковка аппаратов.
c. Резюме.
1. Предисловие
В общем и целом хочется отметить, что существует огромное количество вариантов взаимного расположения орбит, расположения аппаратов на орбитах. Каждая стыковка по-своему уникальна, потому что в процессе приходится учитывать множество факторов, которые никогда не складываются в одну и ту же картину. Учитывать приходится очень многое вплоть до нахождения аппаратов на теневой стороне планеты, поэтому найти какое-то универсальное решение для всех случаев сразу, не представляется возможным. Это справедливо как для этапа сведения орбит, так и для этапа финального сближения и стыковки.
Целью настоящего руководства является лишь описание общих принципов, показать некоторые неочевидные моменты, а так же дать минимум теории, а затем, на примере нескольких наиболее типовых случаев, показать, как выполняется стыковка.
Рекомендую рассматривать представленные случаи как упражнения для выполнения в ходе или сразу прочтения. Выполнив упражнения самостоятельно, пользуясь настоящим руководством, Вы приобретете необходимые навыки по сведению орбит и стыковке и сможете выполнять стыковки практически любых кораблей и при любом взаимном их расположении.
2. Системы управления КА
Космический аппарат, перемещаясь в пространстве, имеет 6 степеней свободы. 3 поступательных и три вращательных. То есть корабль может двигаться по трем осям: вперед-назад, вверх-вниз, вправо-влево, а также может вращаться в плоскостях тангажа, крена и рысканья.
Естественно, что в полете необходимо иметь возможность не только контролировать положение аппарата, но и управлять положением и ориентацией корабля в пространстве. Для этого существует два в корне отличающихся друг от друга способа.
a. SAS и ASAS
Система SAS предназначена для управления кораблем по рысканью, крену и тангажу. Она не может перемещать корабль в пространстве, а может только вращать его. Система основана на эффекте гироскопа и использует специальные маховики, с помощью которых можно создавать необходимый момент вращения. Подобными маховиками, имеющими различный момент силы, оснащены все блоки управления и кабины КА. Дополнительно существует отдельный блок SAS который при необходимости можно устанавливать несколько на один аппарат. ASAS делает все то же самое, что и SAS, но позволяет также фиксировать ориентацию корабля относительно полюса мира. При этом система ASAS использует все доступные ей способы, включая системы SAS кабин, блоков и отдельные SAS модули, в этом режиме она также управляет системой RCS, элеронами и вектором тяги двигателей. Не рекомендуется ставить на один корабль несколько модулей ASAS, во избежание конфликтов между системами, что может привести в работе разных блоков в противофазе и, как следствие, к сильной тряске вплоть до разрушения аппарата. По нажатию клавиши Т, загорается контрольная лампа SAS возле навбола и включается система стабилизации. Если на корабле присутствует модуль ASAS, то система будет стараться удерживать фиксированное положение корабля относительно полюса мира. Если этого модуля нет, и корабль достаточно легкий, то он будет лишь останавливать вращение. Нажатие клавиши F переключает состояние системы, но только пока нажата клавиша F. То есть можно нажать ее повернуть корабль и отпустить. Корабль будет удерживать новое направление, заданное в момент отпускания клавиши.

b. RCS
Однако, как сказано выше, система SAS может только поворачивать корабль, и не может перемещать его в пространстве вдоль каких либо осей. Для этого применятся система RCS. Она представляет собой набор маленьких двигателей, которые определенным образом расположены на корпусе корабля, и так как это, по сути, реактивные двигатели, то они могут не только поворачивать корабль, но и смещать его в любую сторону, если это позволяет конфигурация их расположения.

Рис 1. RCS Thruster Port.
Конструктивно модули RCS представляют собой блоки двигателей направленных в 4 разные стороны, лежащие в одной плоскости. Поэтому чтобы иметь возможность смещать корабль в нескольких направлениях их нужно определенным образом располагать на корабле.
По-английски они называются RCS thrusters - я буду называть их трастеры, не совсем правильно, но так сложилось. Для работы системы обязательно нужен бак с однокомпонентным топливом - монопропеллентом. Применение топливных шлангов и других деталей для работы системы не требуется.
3. Требования к конструкции корабля.

Рис 2. Трастеры и силы действующие на корабль.
На Рис 2а показан корабль с трастерами, расположенными в одной плоскости. Одновременное включение трастеров 1 и 4 приведет к развороту корабля вокруг центра масс против часовой стрелки. Возникающий момент равен произведению силы, то есть тяги двигателя, на плечо силы. На рисунке Рис 2 б показаны плечи сил L1 и L2 и силы, возникающие под действием трастеров.
На Рис 2в показано смещение корабля вдоль оси Y. Для этого необходимо включить трастеры 2 и 4. Как нетрудно заметить, если плечи L1 и L2 равны, корабль будет смещаться так как и задумано, но если плечи имеют разную длину, в нашем случае L1 больше чем L2, то момент от трастера 2 окажется больше чем от трастера 4 и это приведет к паразитному вращению корабля по часовой стрелке. Из всего сказанного следует что:
1) Трастеры должны быть расположены симметрично относительно ЦМ;
2) Трастеры должны быть расположены максимально далеко от ЦМ для создания наибольшего момента;
3) Нужно учитывать как будет смещаться центра масс аппарата при выработке топлива и изменении конфигурации, чтобы Ваш космический аппарат не терял управляемости.
Вариант 1.

Рис 3. Типовое размещение трастеров на корабле.
Трастеры размещаются в двух кольцах по 4 шт в одном кольце. Кольца максимально отодвинуты от ЦМ и расположены симметрично относительно него. Общее количество трастеров - 8.
Вариант 2.
Рис 4. Типовое размещение трастеров на самолете.
Трастеры размещены в одной плоскости, но так как в этом случае невозможно смещать корабль в поперечном направлении (вправо-влево), добавлено еще 4 линейных RCS порта. Такой вариант подходит больше для самолетов, так как размещение трастеров сверху и снизу фюзеляжа как правило затруднено и дает слишком маленькие или неравные плечи силы.
Система ASAS во время своей работы так же может использовать RCS трастеры для сохранения ориентации КА. Поэтому если мощности SAS достаточно для управления КА, то RCS лучше держать выключенной, чтобы не тратить зря монопропелент.
Включение и выключение системы RCS в полете предусмотрено клавишей R. Когда система включена на навболе загорается контрольная лама RCS зеленого цвета. Управление системой RCS по осям вращения осуществляется, так же как и с помощью SAS – клавишами WASD. Смещение аппарата вдоль осей осуществляется клавишами IJKL и HN. J L влево-вправо. K I вверх-вниз. H N вперед-назад. В случае неверного размещения трастеров на корабле, при его линейном смещении клавишами IJKL, будет возникать паразитный момент, стремящийся развернуть корабль в ту или иную сторону, в зависимости от расположения трастеров относительно ЦМ. Собственно говоря, этот момент есть почти всегда, потому что расставить их идеально с учетом выработки топлива точно невозможно, но одно дело, когда момент небольшой и приемлемый, другое дело, когда это серьезно мешает стыковке. При боковом смещении корабля (IJKL) лучше включать ASAS, для того чтобы она нивелировала возникающие паразитные моменты, сохраняя постоянную ориентацию корабля в пространстве.
4. Сборка корабля.
Приступим к практике, соберем два корабля которые мы будем стыковать на орбите. Корабль должен иметь вид аналогичный кораблю на Рис. 3. Корабль состоит из следующих деталей: кабина с двумя парашютами, декуплер, бак с монопропеллентом, бак для топлива, двигатель, солнечные батареи, фонарь для подсветки зоны стыковки, и конечно же два кольца трастеров. Само собой док-порт для того чтобы корабли можно было состыковать. Масса корабля около 20 тонн.
5. Запуск кораблей на орбиту.
Запускаем корабль-цель. После выхода переходим в режим карты.
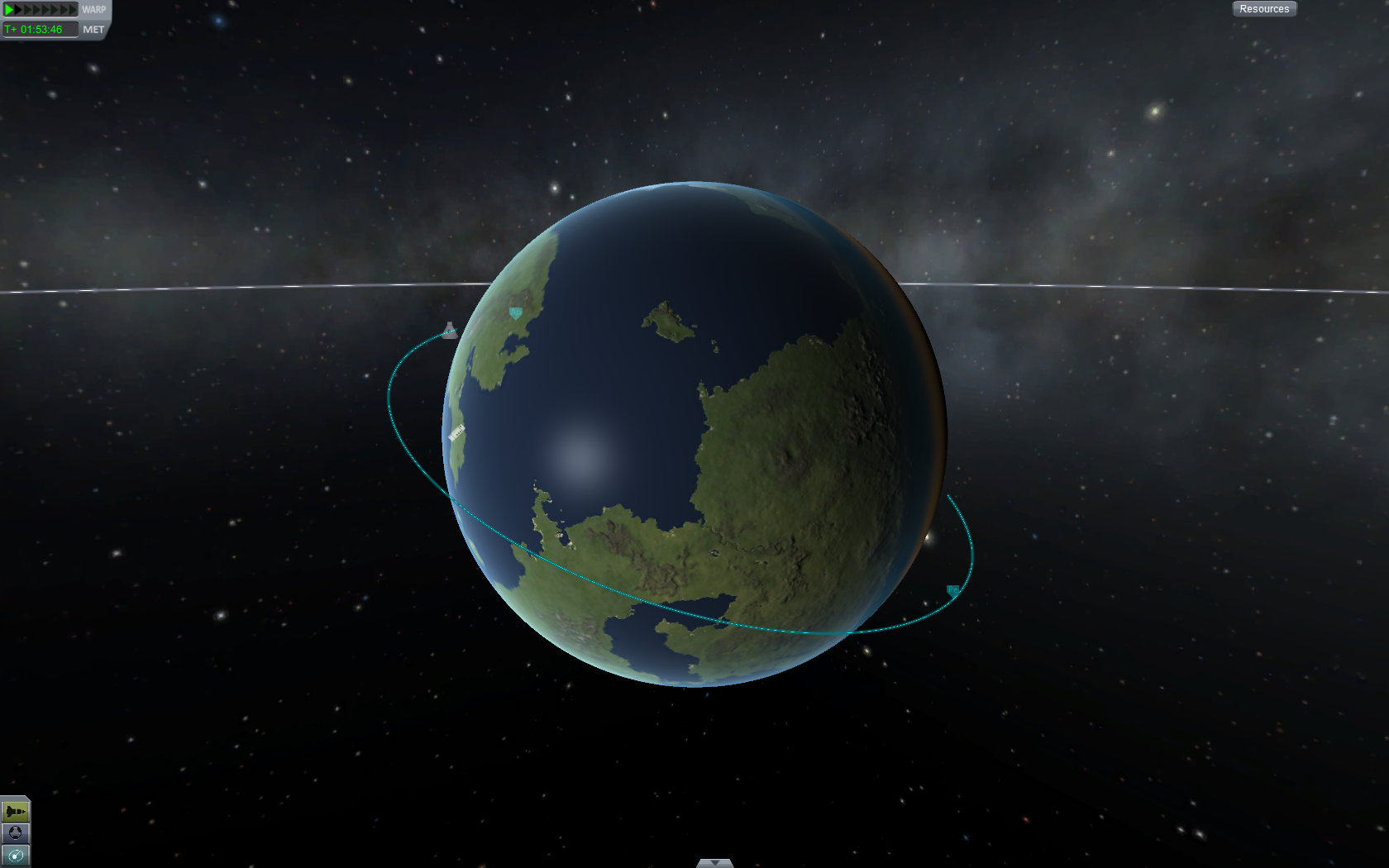
Рис 5а. Орбита цели.
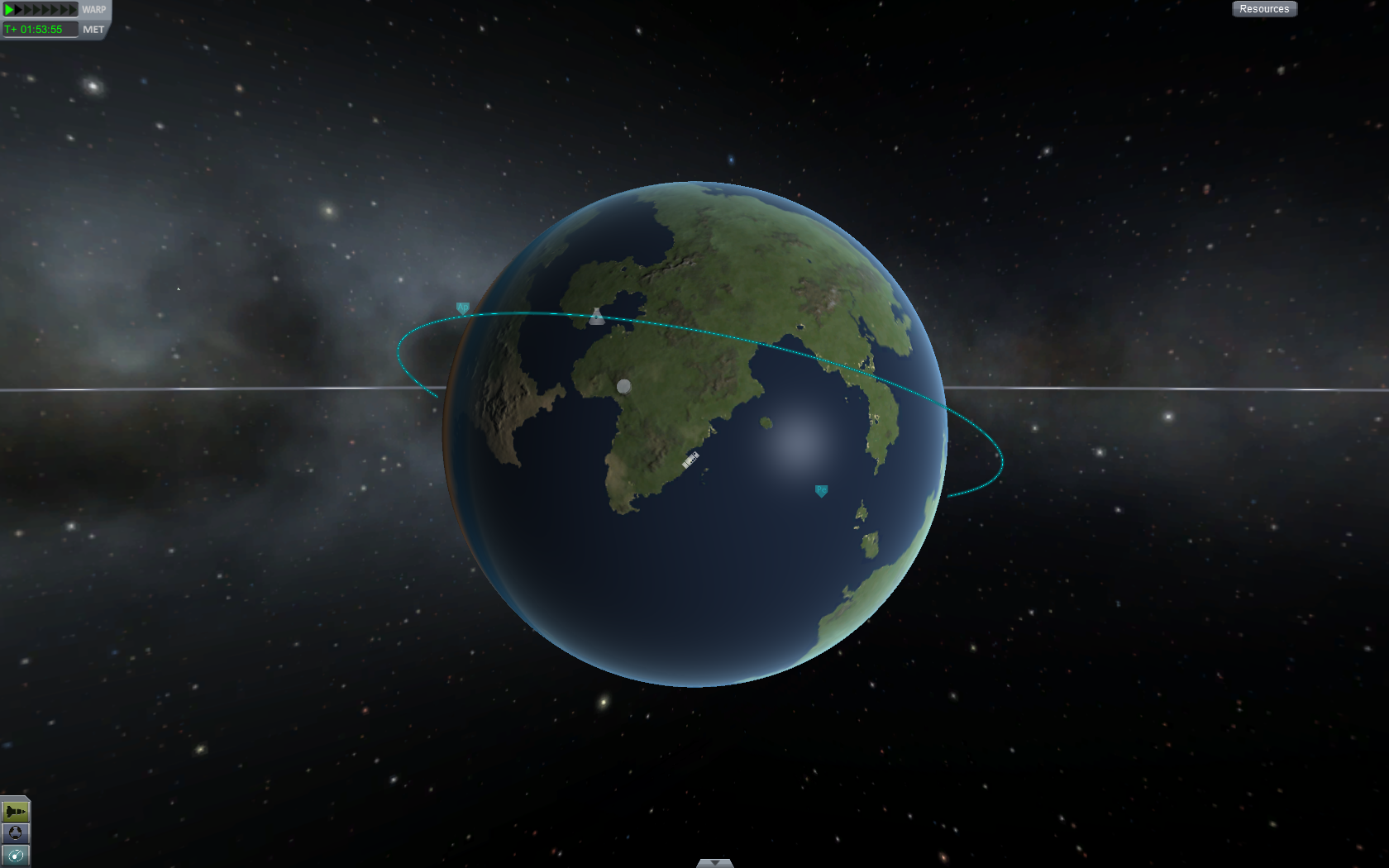
Рис 5б. Орбита цели.
Как видим, корабль-цель находится на орбите 115/115 км с наклонением 20 градусов. Наша задача запустить новый корабль и состыковать их на орбите. Для этой цели мы будем использовать аналогичный аппарат.
6. Сведение орбит (догонялки).
a. Сведение круглых орбит.
Прежде всего, нам необходимо запустить корабль на орбиту с такой же или хотя бы близкой высотой перицентра и апоцентра. Нам выгоднее запускать корабль так, чтобы он оказался на 45-120 градусов впереди цели, то есть наш корабль должен двигаться с небольшим, но заметным опережением. Расстояние между кораблями на результат стыковки не влияет, изменяется лишь количество топлива, требуемого для выполнения маневров. Что именно происходит, я объясню позже. Если запуск происходит с Кербина то всегда есть возможность подгадать нужный момент.
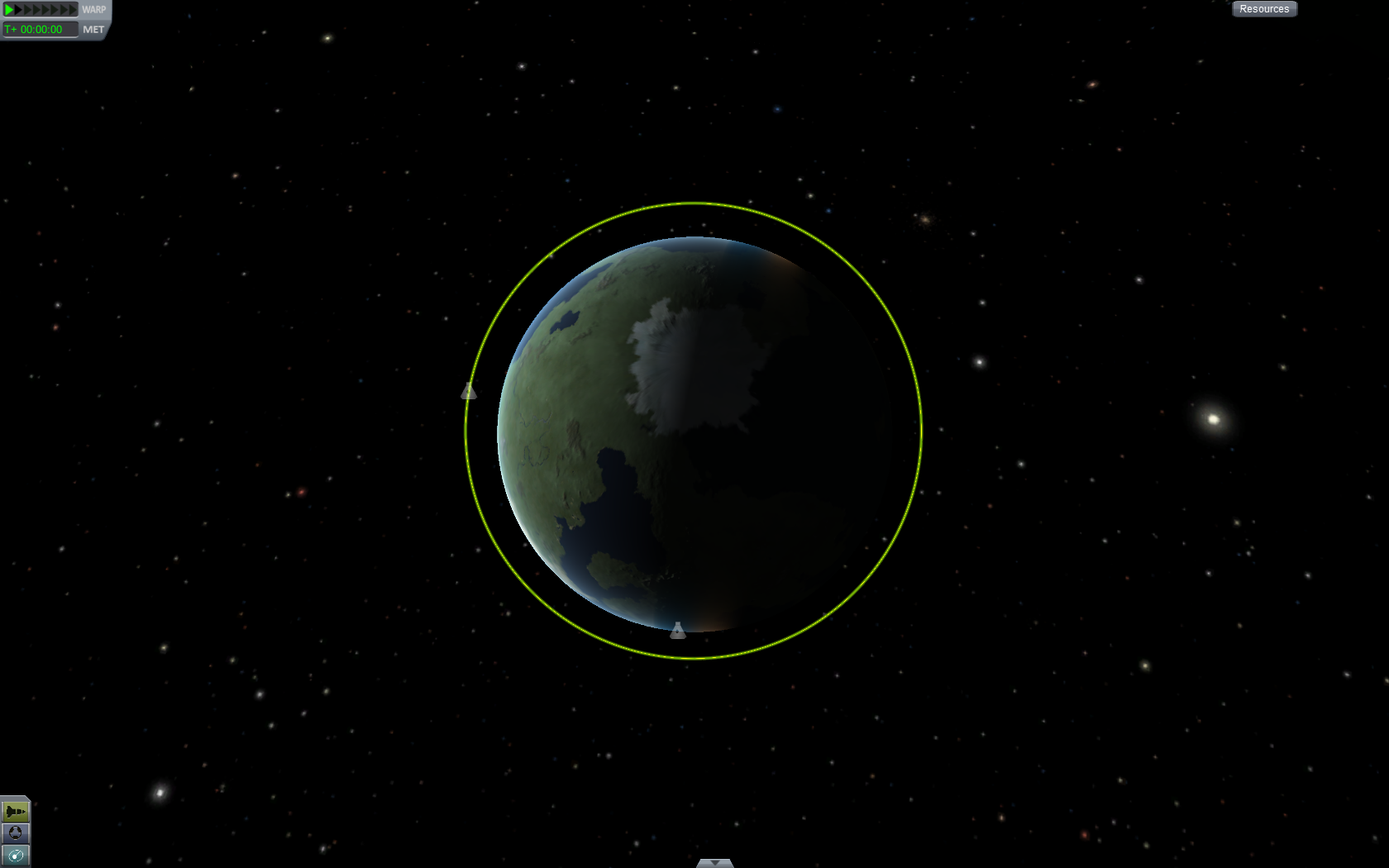
Рис 6. Момент старта. Цель на 90 градусов позади нас.
Запускаем корабль. О том, как правильно построить РН, и доставить КА на орбиту можно прочесть в соответствующих руководствах.
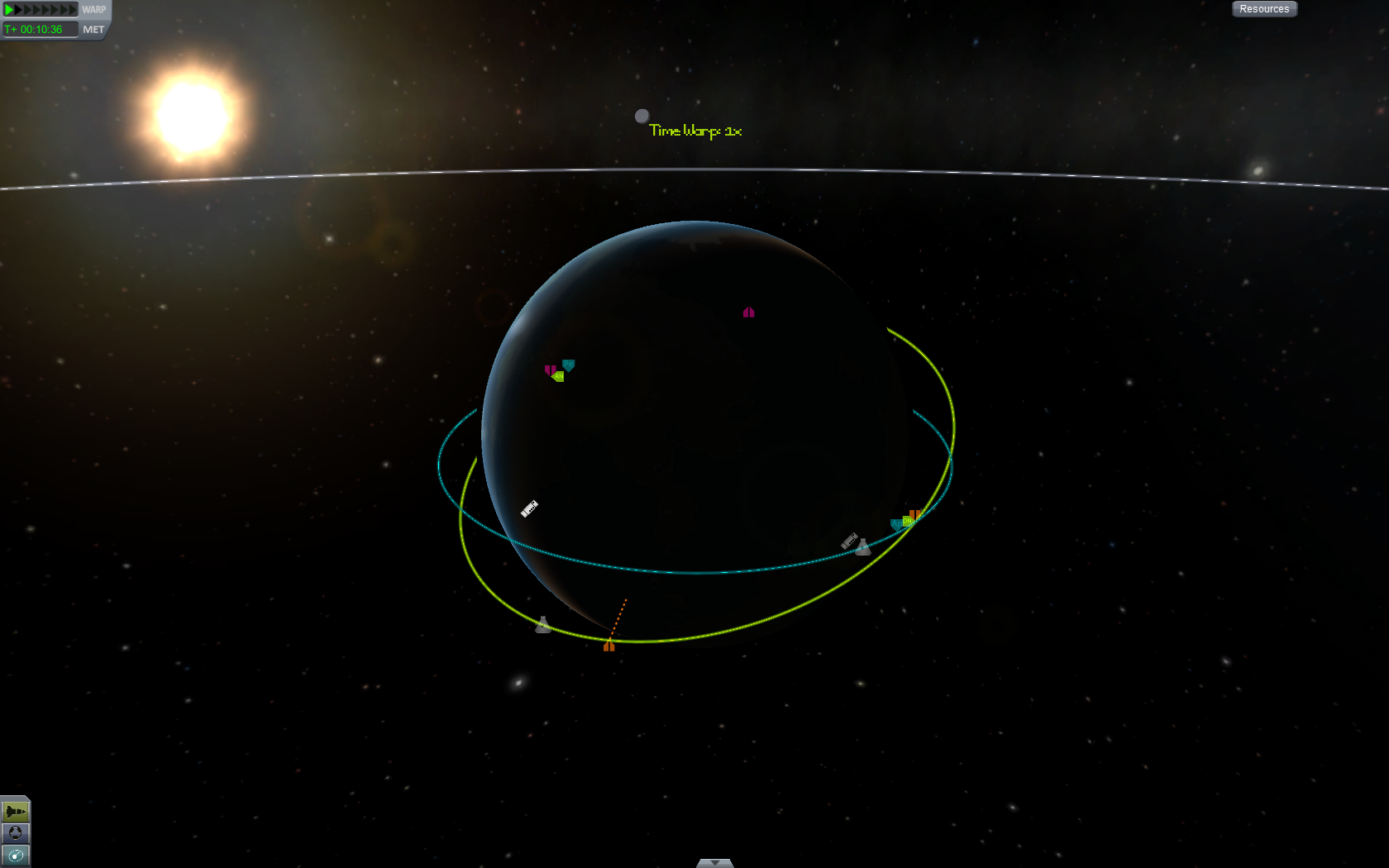
Рис 7а. Корабль на орбите

Рис 7б. Корабль на орбите
Сделано
Итак, орбиты лежат в разных плоскостях, и цель находится немного позади нашего корабля. Наклонение орбиты цели 20 градусов, у нашего корабля наклонение почти 0. Приступим к выполнению маневров сближения. Первым делом нужно согласовать наклонение орбит. Для этого выбираем цель, ее орбита обозначается зеленым и отображаются восходящий и нисходящий узлы AN и DN. Эти точки обозначают точки пересечения плоскостей орбиты, и наклонение нужно изменять в одной из этих точек. Планируем маневр в одном из узлов и тянем за фиолетовую стрелочку планировщика, так чтобы плоскости совпали, при сведении апоцентр будет убегать, компенсируем это зелеными стрелками. Если восходящий и нисходящий узлы развернулись на 90 градусов, относительно начального положения, то это значит, что маневр спланирован с максимальной точностью, если больше, то орбиты будут наклонены относительно друг друга, но уже в другую сторону. При наведении на узел можно увидеть точное значение в градусах. Нужно добиваться значений 0,0 или NaN. При планировании этого маневра желательно сделать так чтобы орбиты касались или пересекались друг с друга в какой-либо точке.

Рис 8а. Планирование маневра наклонения. Промежуточное положение целевой орбиты.

Рис 8б. Планирование маневра наклонения. Конечное положение целевой орбиты, почти полное совпадение орбит.
При прохождении узла выполняем маневр. По окончании выполнения маневра проверяем положение узлов. И если есть расхождения с запланированным изначально, поправляем с помощью маленьких и очень осторожных включений двигателя, либо используем систему RCS. Ее мизерной тяги достаточно для точной подстройки орбиты.

Рис 9. Выполнение маневра. Наклонение орбиты нашего корабля приближается к целевой.

Рис 10. Маневр выполнен.
Маневр выполнен. Мы имеем две орбиты, лежащие в одной плоскости, и почти совпадающие друг с другом. Видно, что цель находится позади нас.
Обращаем внимание на цветные маркеры на орбитах.

Рис 11. Точки пересечения. Удаление от цели.
Два оранжевых маркера и пунктирная линия возле одного из них. Маркер направленный вниз - это точка пересечения орбит. Маркер направленный вверх и с пунктирной линией, выходящий из центра планеты это положение цели в момент пересечения. То есть когда наш корабль будет находиться в точке пересечения, цель будет находиться там, где находится второй маркер. Точную информацию можно посмотреть, наведя мышку на маркер пересечения. Там показан номер пересечения, расстояние до цели в момент прохождения пересечения нашим кораблем и время, оставшееся до прохождения точки. В других точках орбиты могут быть видны два фиолетовых маркера, это пересечение 2. Игра показывает только два ближайших пересечения.
Итак, орбиты аппаратов очень близки, но аппараты разделены некоторым углом. Этот угол называется фазовым углом. В принципе, поскольку средняя скорость аппаратов немного отличается, то рано или поздно возможно аппараты сблизятся без посторонней помощи. Однако это может занять не один день или даже месяц, причем заранее неизвестно сколько именно. Поэтому процесс необходимо ускорить. Цель находится позади нас и нам нужно подпустить ее поближе. То есть нужно увеличить период обращения нашего аппарата.
Планируем маневр в точке, где орбиты пересекаются. Для того чтобы подпустить цель поближе, необходимо выдать разгонный импульс по ходу вращения, подняв таким образом апоцентр орбиты и увеличив период вращения. Необходимо спланировать маневр так, чтобы точку пересечения цель и наш корабль прошли одновременно. Для этого тянем планировщик за проградный вектор. Таким образом, точка пересечения оказывается перицентром нашей орбиты, а с другой стороны планеты поднимается апоцентр. Тянем проградный вектор до тех пор, пока маркеры пересечения и положения цели не совпадут. Пикселхантинг в помощь .

Рис 12 а. Планирование маневра. Целевая орбита.
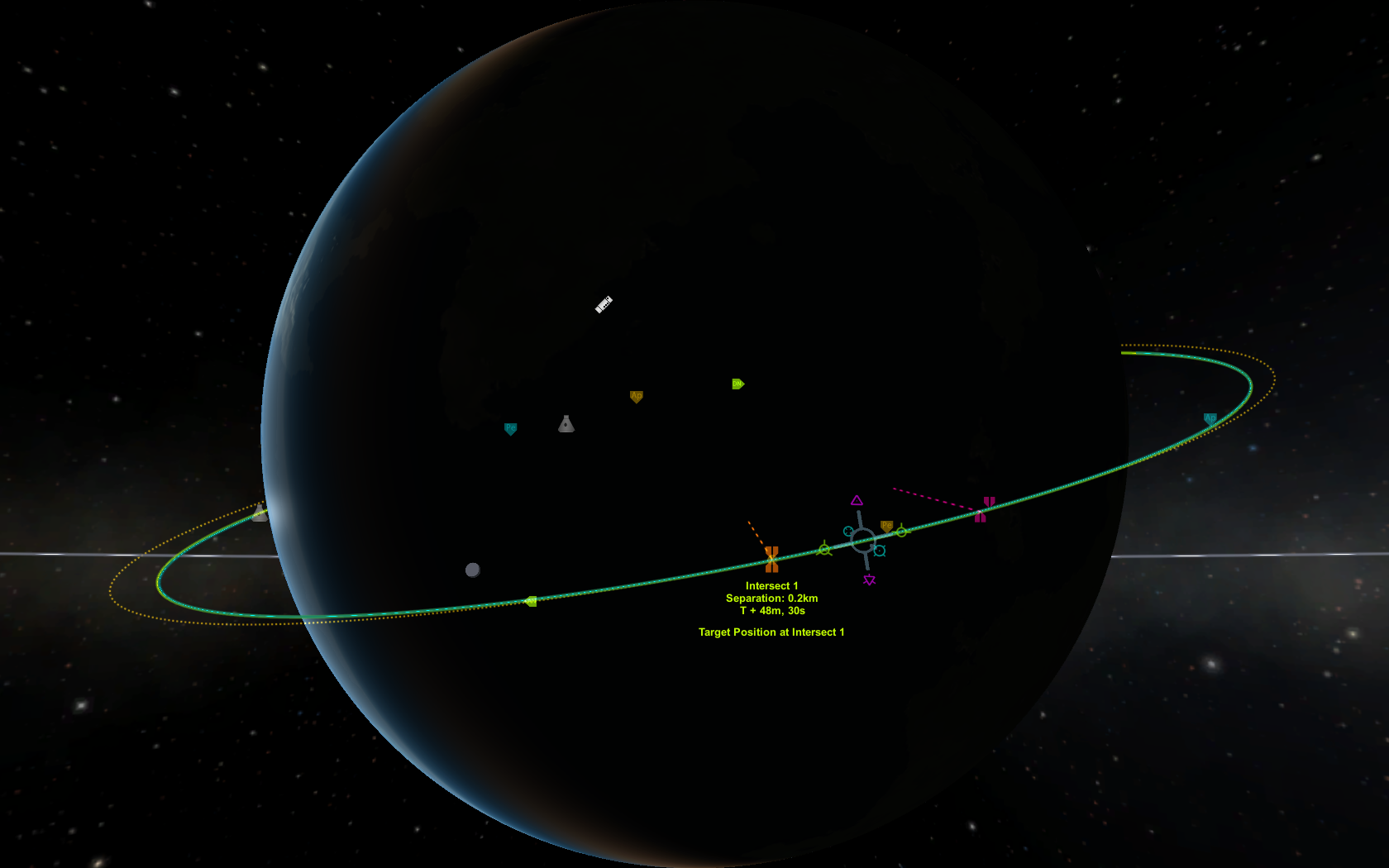
Рис 12 б. Планирование маневра, точка пересечения.
Проверяем расстояние в точке встречи. 0,1-0,2 км это замечательно, но довольно опасно, так как корабли могут столкнуться, 0,2-0,3 идеально. 0,3-0,6 хорошо, 0,6-1,3 приемлемо, но финальное сближение будет довольно длительным. 1,3-2 км означает, что где-то допущена ошибка или не очень тщательно выполнены предыдущие маневры. Хотя 2 км тоже являются приемлемой величиной. Больше 2 км значит, что маневры выполнены недостаточно точно.
Выполняем запланированный маневр. После выполнения маневра убираем планировщик и подстраиваем точку встречи, до расчетного положения аккуратно работая двигателем или RCS. Пока мы находимся здесь, возле точки маневра мы можем довольно легко подправить положение апоцентра, и как следствие точки рандеву.
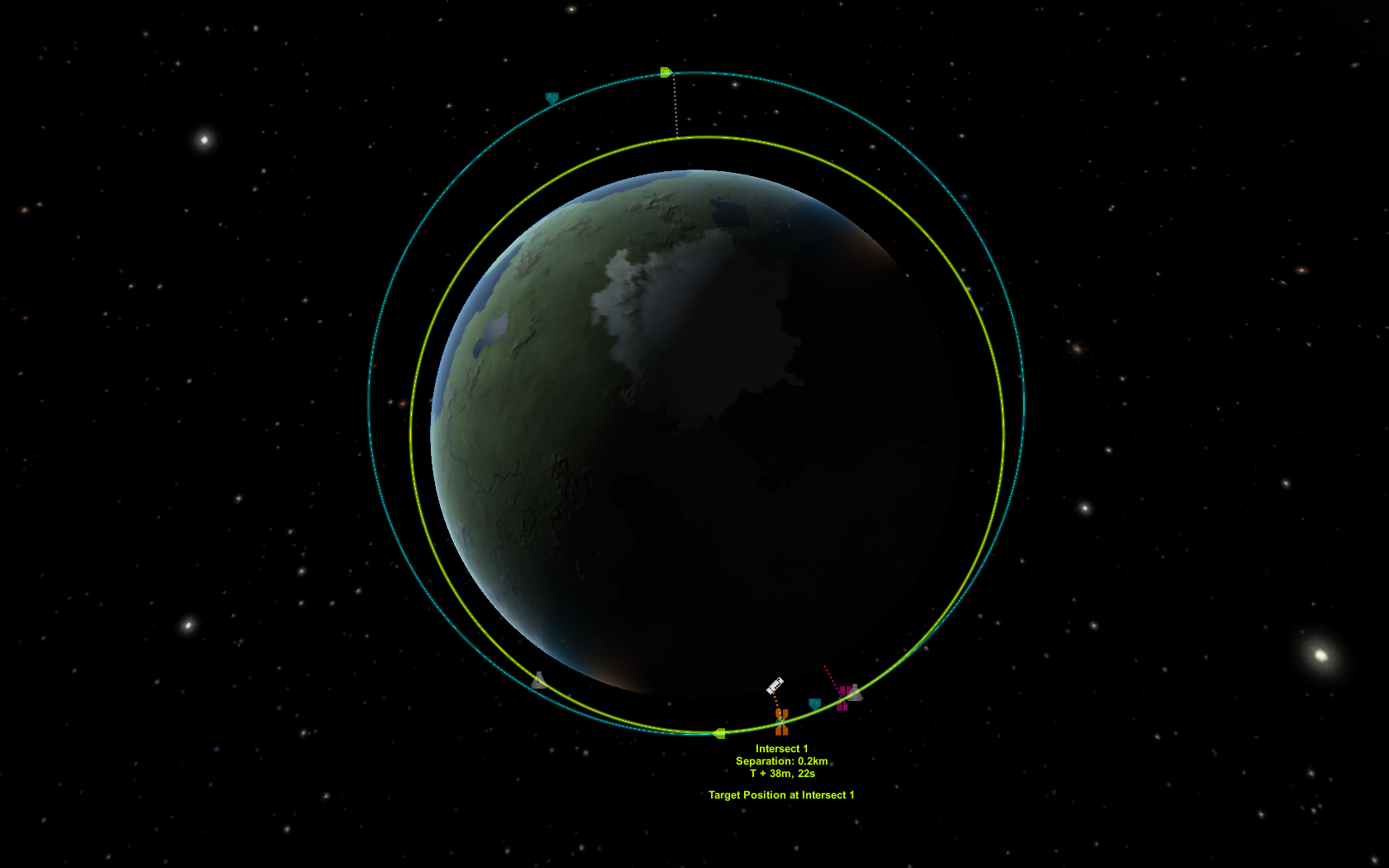
Рисунок 13. После выполнения маневра корабль уходит на эллиптическую орбиту.
Фактически мы забрасываем наш аппарат на чуть вытянутую эллиптическую орбиту, при этом подбираем ее параметры так, чтобы в заданной точке произошла встреча кораблей. В этом примере мы находимся перед целью, и для того чтобы пропустить ее вперед мы немного поднимаем орбиту. Если бы цель находилась перед нами, то поднимать орбиту пришлось бы до гораздо более значительной высоты. Хотя в этом случае мы могли бы ускориться сами, понизив нашу орбиту и догнав цель за один виток, но так как ниже находится либо поверхность планеты, либо атмосфера, маневр в этом направлении ограничен и есть вероятность, что за один виток сделать это не получится. Планировщик же показывает положение целей и корабля только на полтора-два ближайших витка. Поэтому как я и сказал в самом начале лучше выходить на орбиту чуть впереди цели, чтобы поднимать, а не опускать орбиту, но при этом, не слишком сильно для экономии топлива.
Тем не менее, возможно, что разность скоростей цели и нашего корабля будет слишком большой для конкретного случая, это может быть на орбите большого и тяжелого тела, а также в том случае, если у нас мало топлива.
Тогда можно выполнить сведение за несколько витков. Для этого планируем несколько меньший маневр, нежели для показанного сведения за один виток. При этом расстояние до цели будет уменьшаться с каждым витком. Можно разделив расстояние до цели в момент выполнения маневра, на желаемое количество витков, получить то значение в километрах, на которое нужно уменьшить текущее расстояние, чтобы выполнить стыковку за требуемое количество витков. Звучит сложно, но только на первый взгляд, поясню на примере: В момент выполнения маневра расстояние составляет 800 километров. Допустим, что мы хотим выполнить сведение за 5 витков. 800/5=160. Тогда планируем маневр так, чтобы при следующем проходе этой точки расстояние было 800-160=640 км. Тогда с каждый витком расстояние будет уменьшаться на 160 км, и на пятом витке нам надо будет погасить значительно меньшую разницу скоростей, чем при сведении за один виток. Естественно на промежуточных витках потребуется корректировка орбиты, но ее лучше выполнить перед уходом на последний виток.
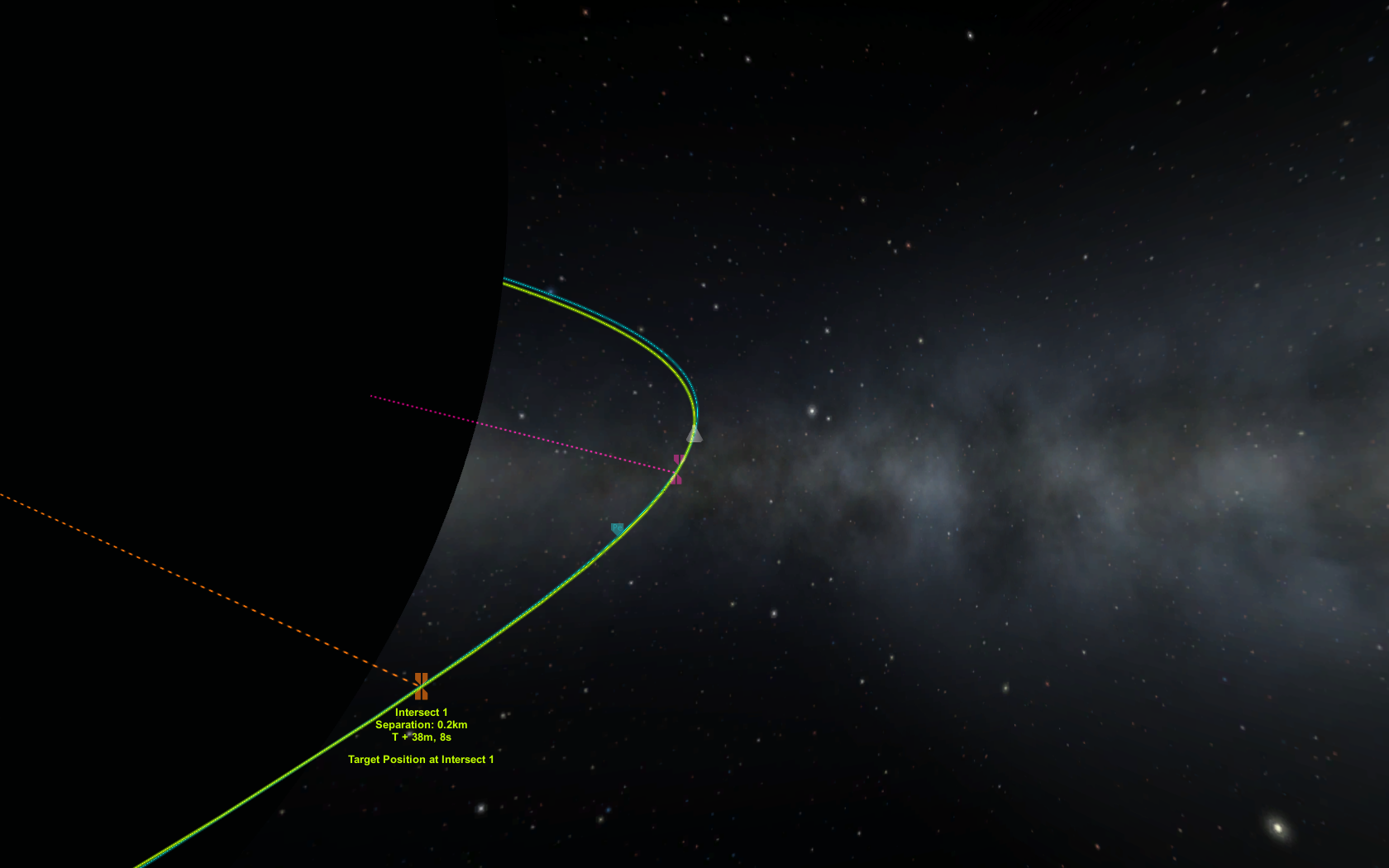
Рис 14. Точка пересечения после выполнения маневра.
Итак, наш КА уходит на длинный виток, а мы, убедившись, что рандеву состоится с минимально возможной дистанцией, планируем, новый маневр в той же точке где произойдет рандеву. Только теперь мы тянем планировщик за ретроградный вектор, чтобы понизить апоцентр орбиты. Так как перицентры орбит нашего корабля и цели могут не совпадать, то можно воспользоваться голубыми маркерами, чтобы повернуть орбиту на нужный угол. Орбиты должны совпадать как можно более точно, это позволит иметь больше времени для проведения финального этапа стыковки.
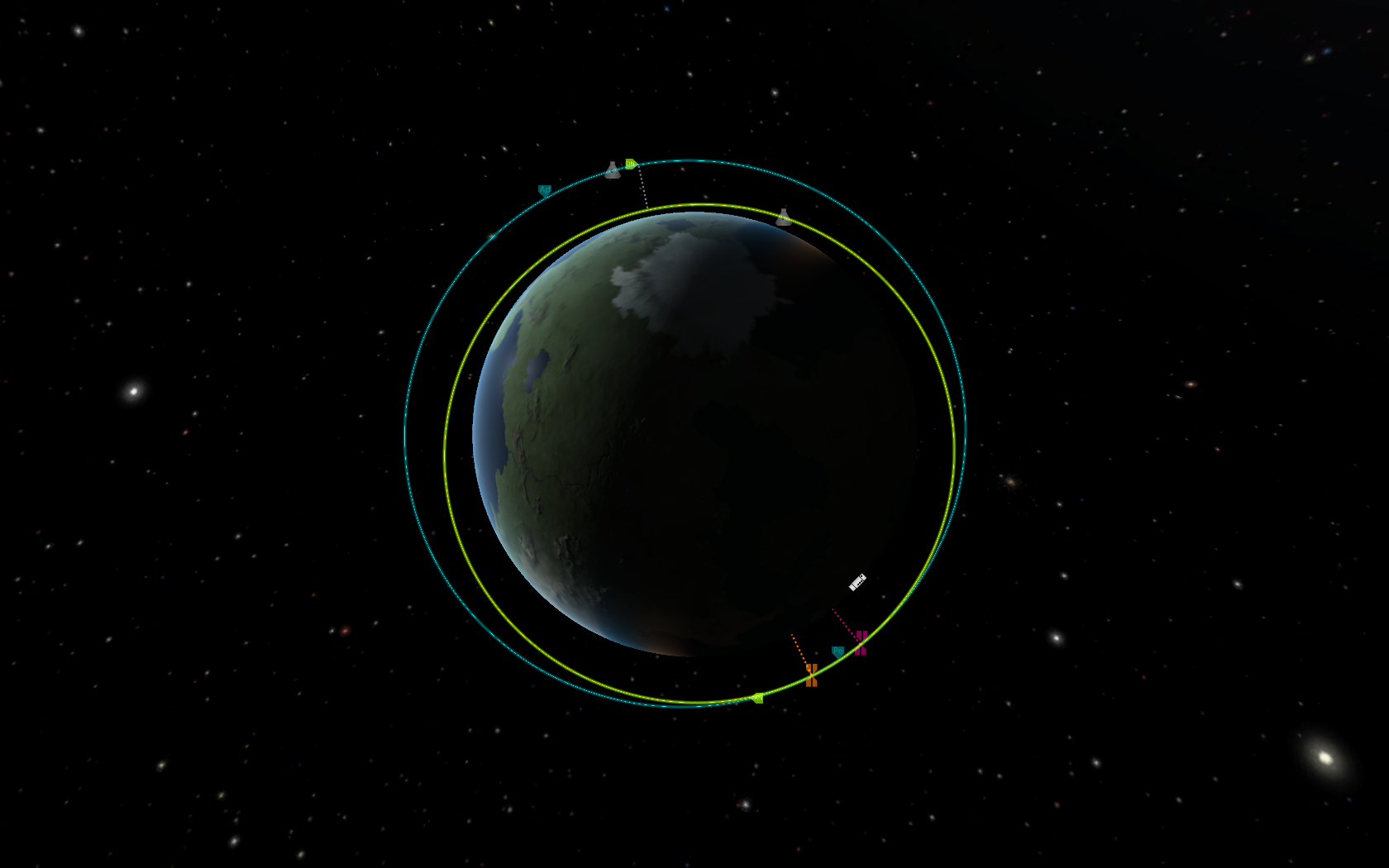
Рис 15. Цель догоняет.
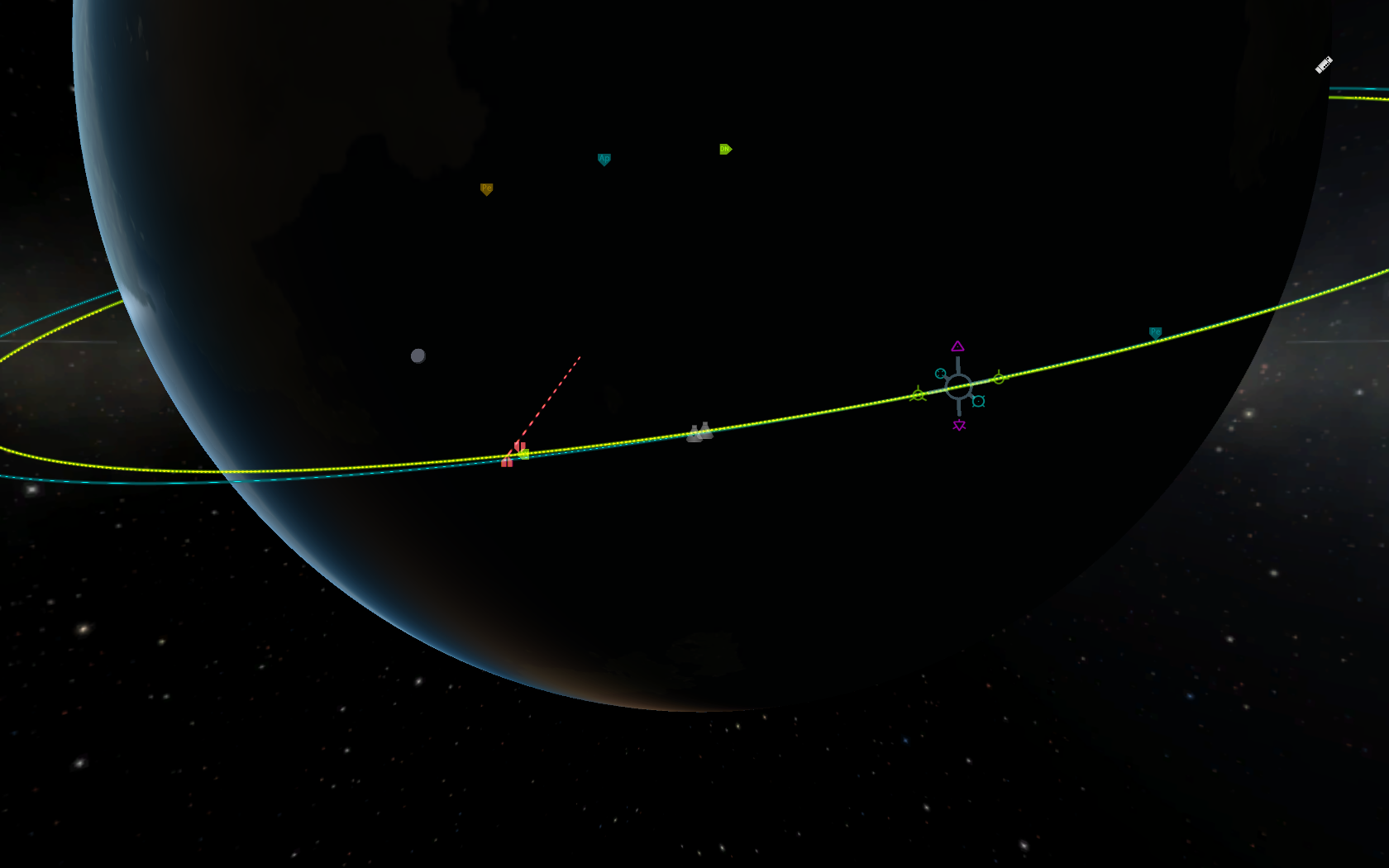
Рис 16 Подход к точке встречи.
Как видим, аппараты подходят к точке встречи. Наш идет с большей высоты и имеет большую скорость. Когда расстояние до цели станет менее 100 км навбол автоматически перейдет в режим target, если этого не произошло, можно нажать на окошко с отображаемой скоростью. На навболе появляется маркер направления «на цель» и маркер направления «от цели». Проградный и ретроградный векторы теперь показывают наш вектор скорости относительно цели, а не орбиты, а индикатор скорости также показывает скорость относительно цели. С описанием маркеров и всем тем, что показывает навбол, можно ознакомиться в соответствующем руководстве.
Выполняем маневр, как запланировано ранее, однако я рекомендую ориентироваться не на маркер маневра, а на ретроградный маркер, так как наша задача погасить относительную скорость. Построенный же и спланированный маневр имеет некоторые неточности, и не будет совпадать с ретроградным вектором. Погасив скорость и добившись значения 0,0 - осматриваемся. Если все прошло хорошо, то неподалеку мы увидим висящий корабль-цель.
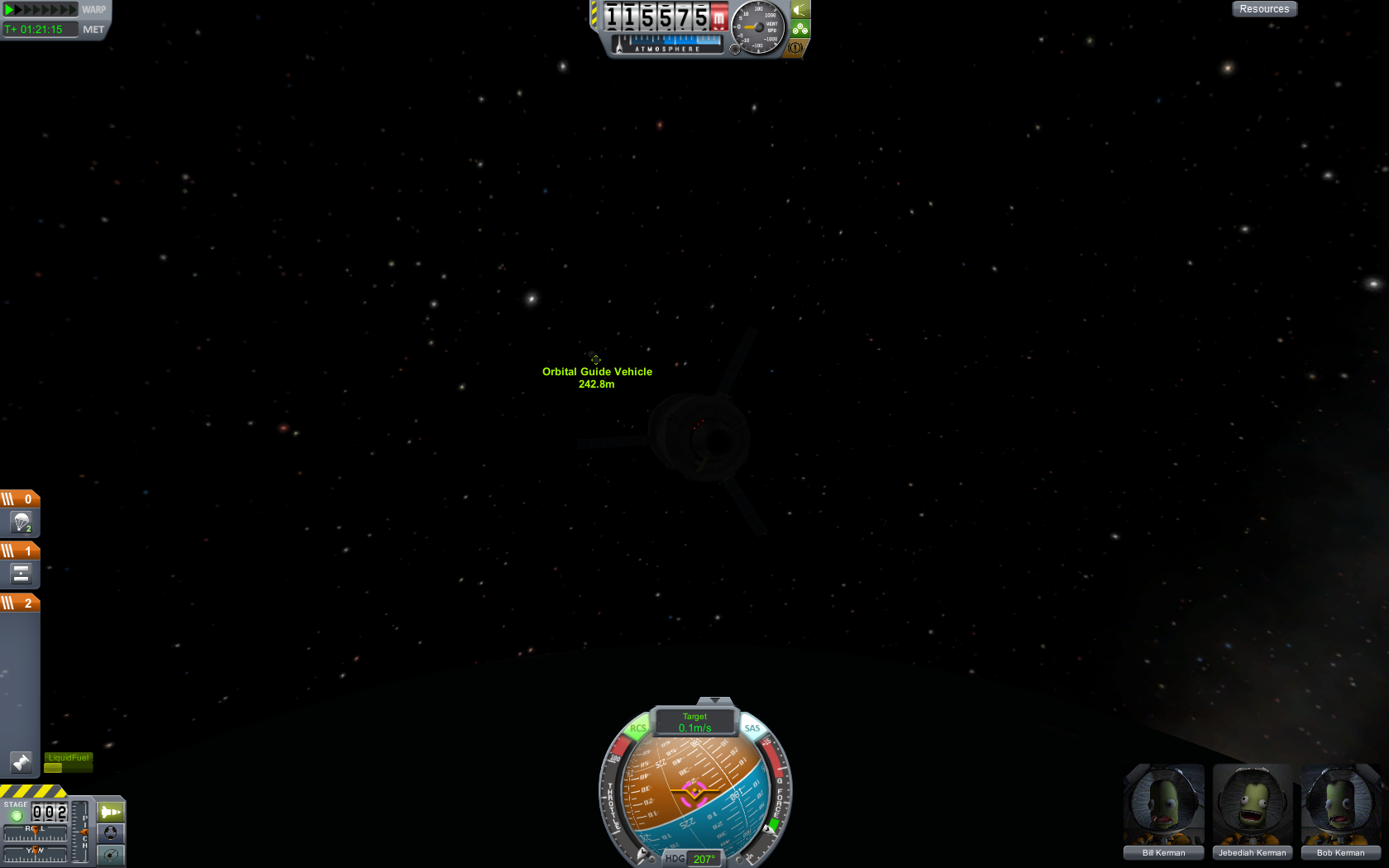
Рис 17. Возле цели.
К сожалению, так совпало, что маневр пришелся на теневую сторону, однако видно, что мы находимся в 240 метрах от цели, что очень и очень хорошо. Для выполнения стыковки на теневой стороне корабль обязательно должен быть оборудован прожектором для подсветки цели и зоны стыковки. В принципе, мы можем начать стыковаться сразу, но для наглядности мы подождем, пока корабли не выйдут из тени, а пока рассмотрим варианты сведения эллиптических орбит. Тем не менее, пока мы ждем, не стоит забывать контролировать расстояние, потому что хотя корабли и находятся очень близко друг к другу, каждый имеет свою орбиту, поэтому к моменту выхода из тени расстояние может измениться.
b. Сведение эллиптических орбит вариант 1.
Допустим, аппараты находятся на эллиптических орбитах 115/510, угол между осями орбит не очень большой и составляет 45-60 градусов. Несмотря на то, что такой маневр имеет кажущуюся большую сложность, его можно выполнить даже быстрее и проще чем для круглых орбит.

Рис 18. Исходное положение.
Орбиты находятся почти в одной плоскости, хотя угол -0,2 градуса все равно нужно исправлять. Планируем в одном из узлов маневр для приведения орбит одну плоскость, используем фиолетовые векторы.
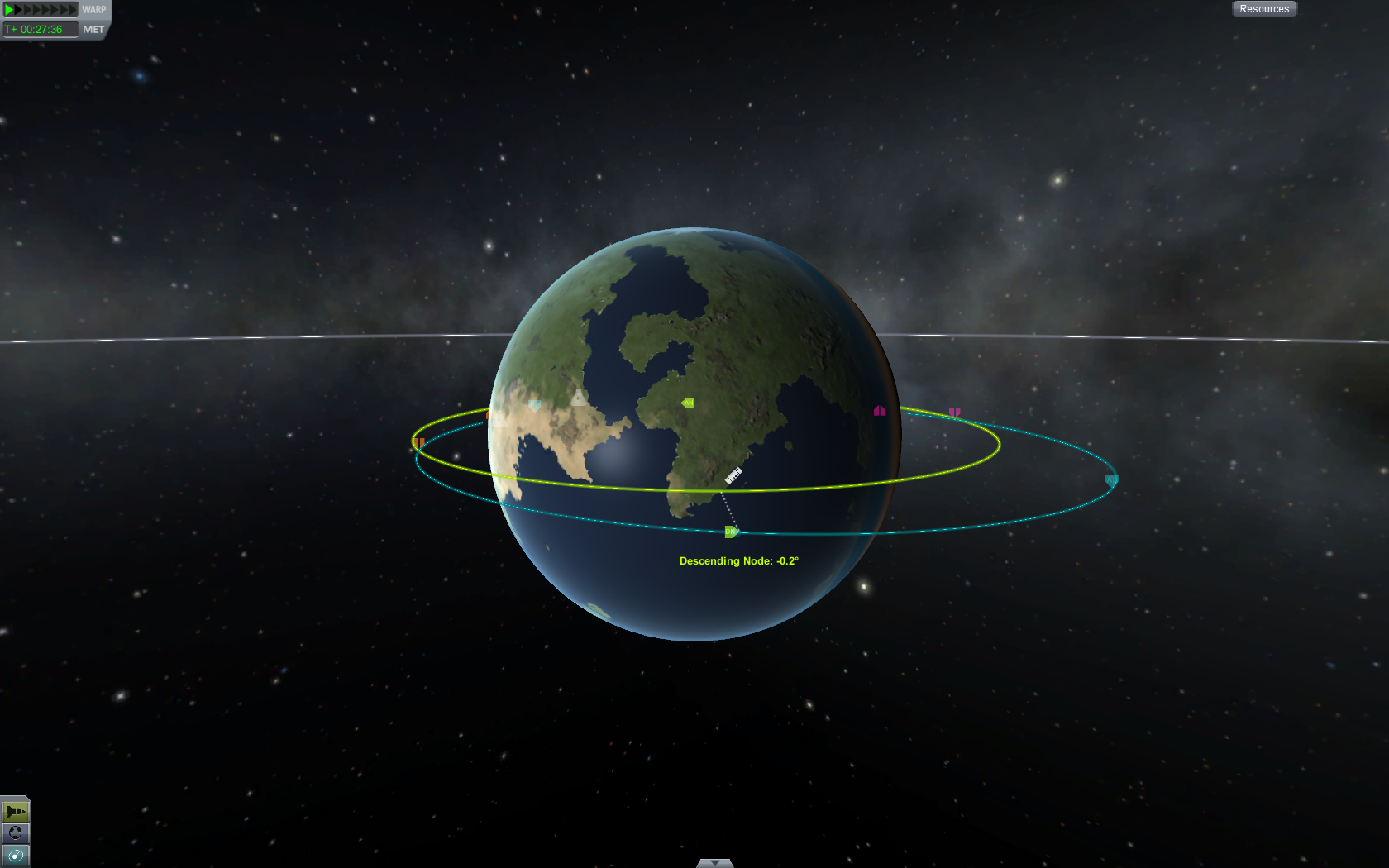
Рис 19. Построение маневра.
После выравнивания плоскостей имеем такую ситуацию. Как видим, узлы находятся теперь в других местах.
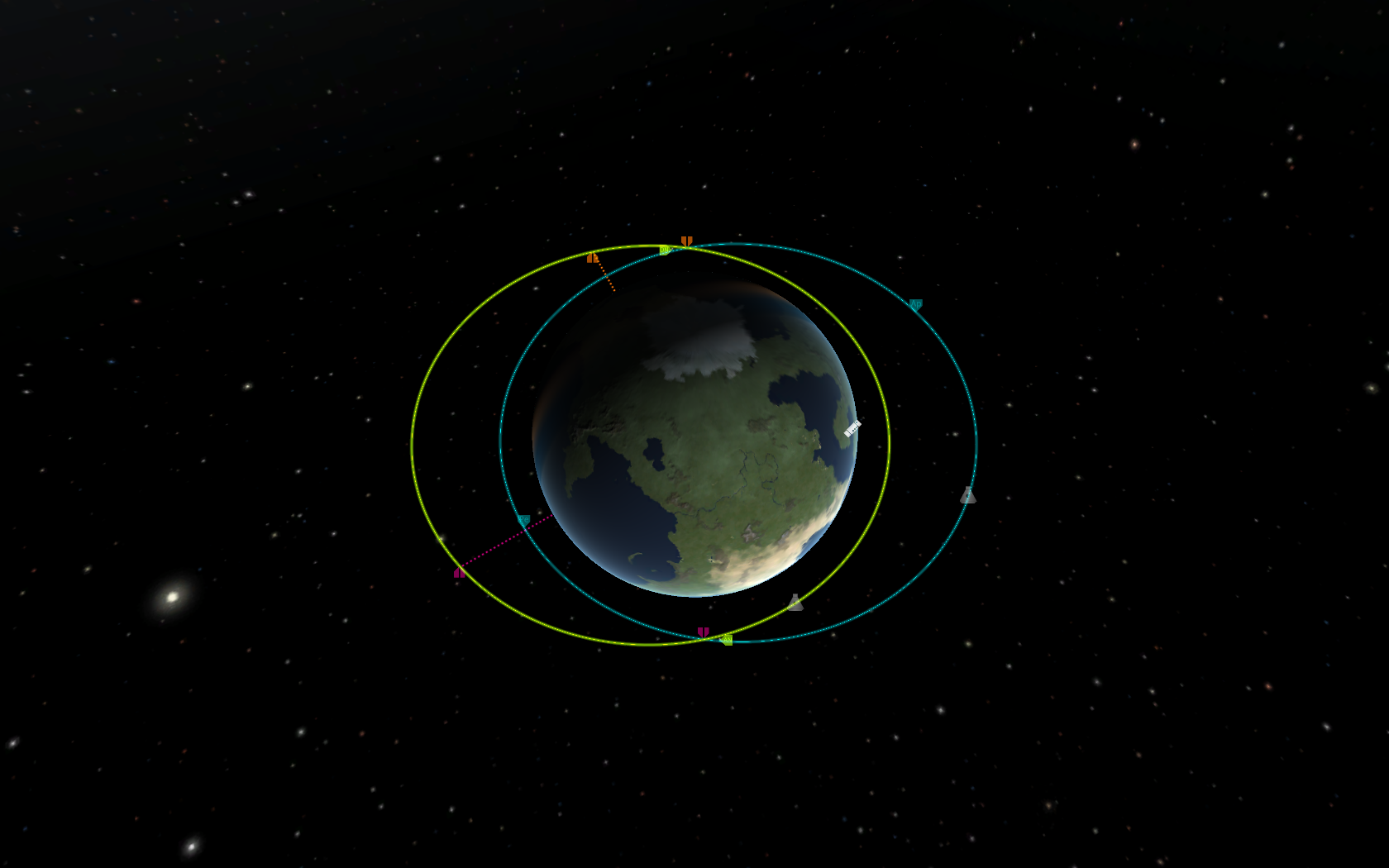
Рис 20. Теперь орбиты в одной плоскости.
Планируем маневр в точке пересечения. Так как мы имеем определенный угол между большими осями орбит и большой эксцентриситет, то для сведения орбит не достаточно пользоваться только проградным и ретроградным векторами (гомановские перелеты). В этой ситуации необходимо использовать голубые маркеры, чтобы управлять поворотом осей орбиты. Работая с планировщиком, подбираем точку пересечения орбит. Добиваемся минимального расстояния между кораблями в этой точке.
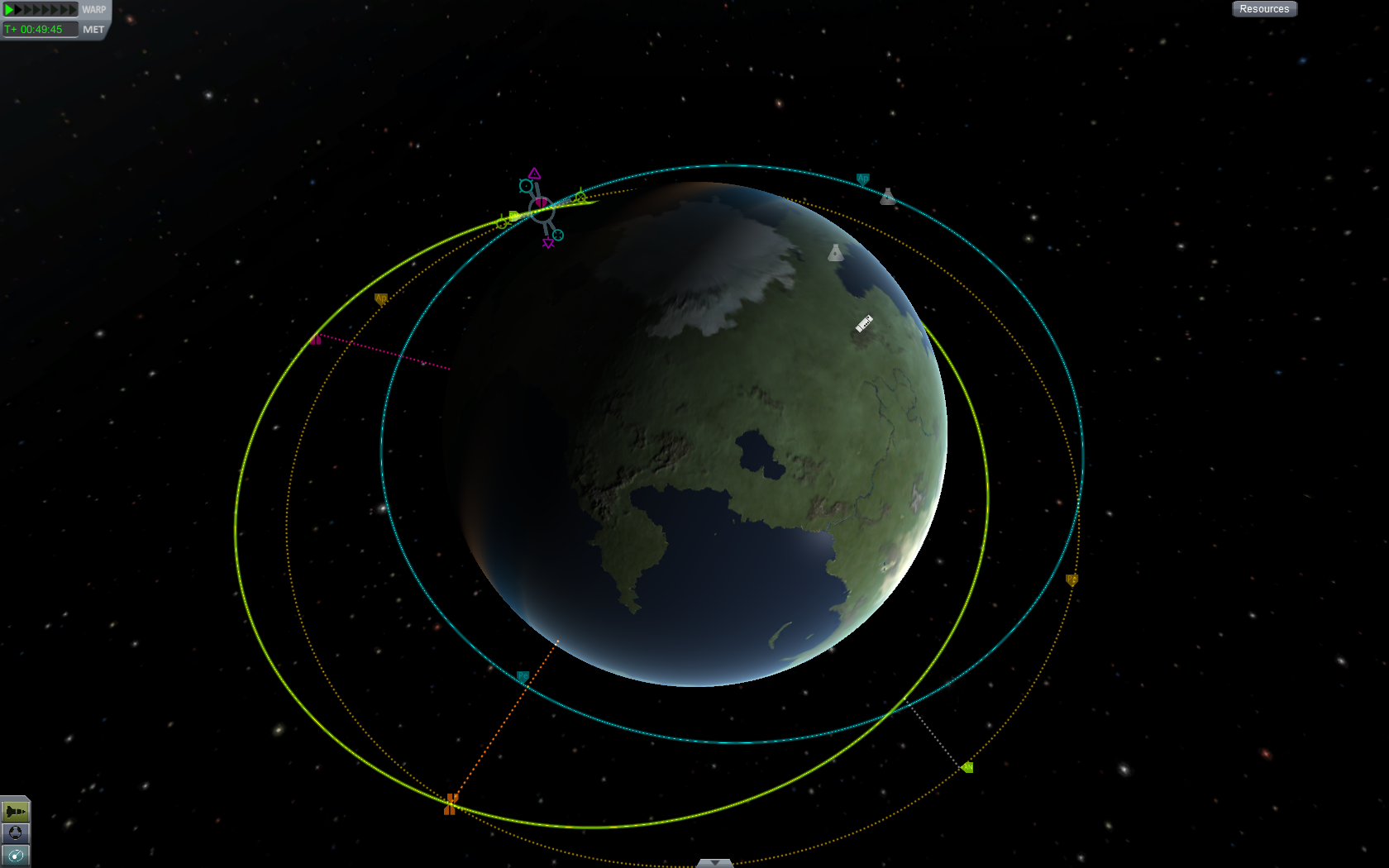
Рис 21. Создание орбиты перехода и подбор точки пересечения.
Выполняем маневр, а затем планируем маневр в новой точке пересечения.
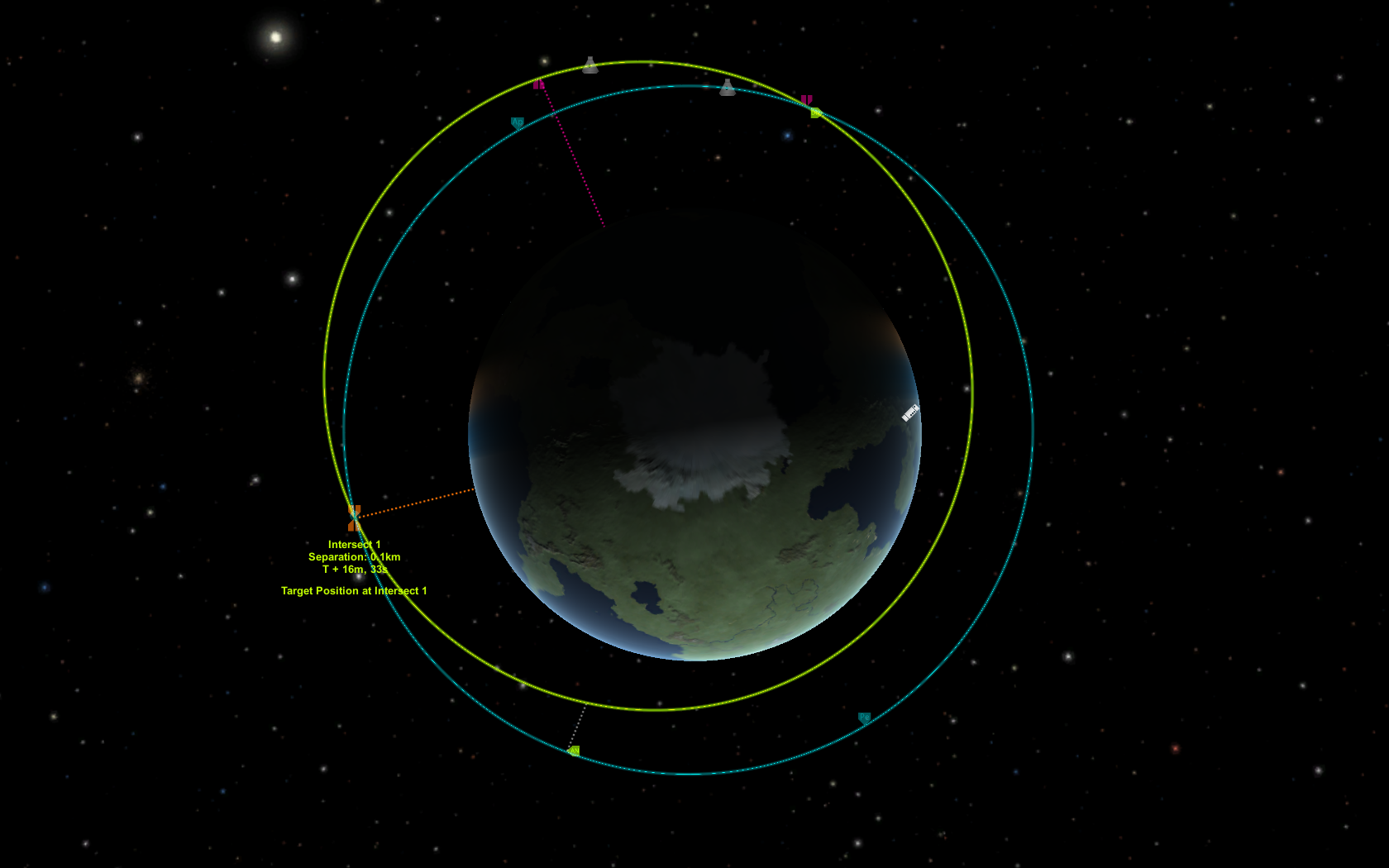
Рис 22. Создаем маневр, стараемся сделать так чтобы орбита цели и нашего аппарат после маневра совпали.
Новый маневр планируем таким образом, чтобы орбиты максимально совпали. Опять же используем как зеленые, так и голубые маркеры. Так как орбиты совпадут, а расстояние будет минимальным, это финальный маневр. Планирование этого маневра позволит нам оценить необходимую ΔV для выполнения маневра. Тем не менее, можно обойтись и без планирования этого маневра, просто погасив скорость относительно цели в точке пересечения (может рекомендоваться только для опытных пилотов, и кораблей с большой тяговооруженностью). Для этого, при сближении, включаем навбол в режим Target, направляем нос аппарата на ретроградный вектор и включаем двигатель до обнуления показаний датчика скорости. Переходим к стыковке.
c. Сведение эллиптических орбит вариант 2.
Второй вариант эллиптических орбит. Аппараты находятся на орбитах 115/1330 км. Имеет место небольшое наклонение 0,4 градуса.
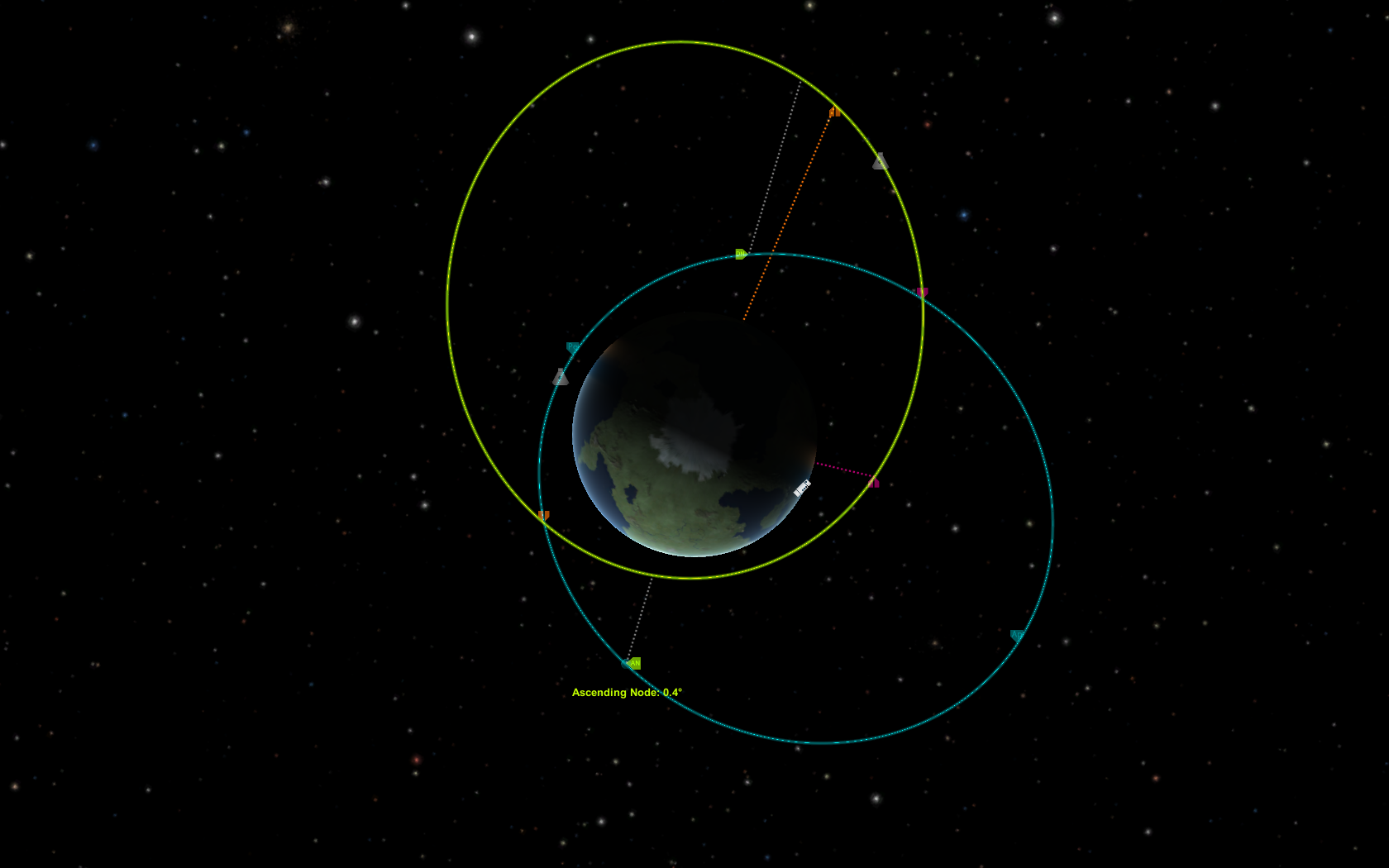
Рис 22a. Общий вид орбит.
Устраняем наклонение.
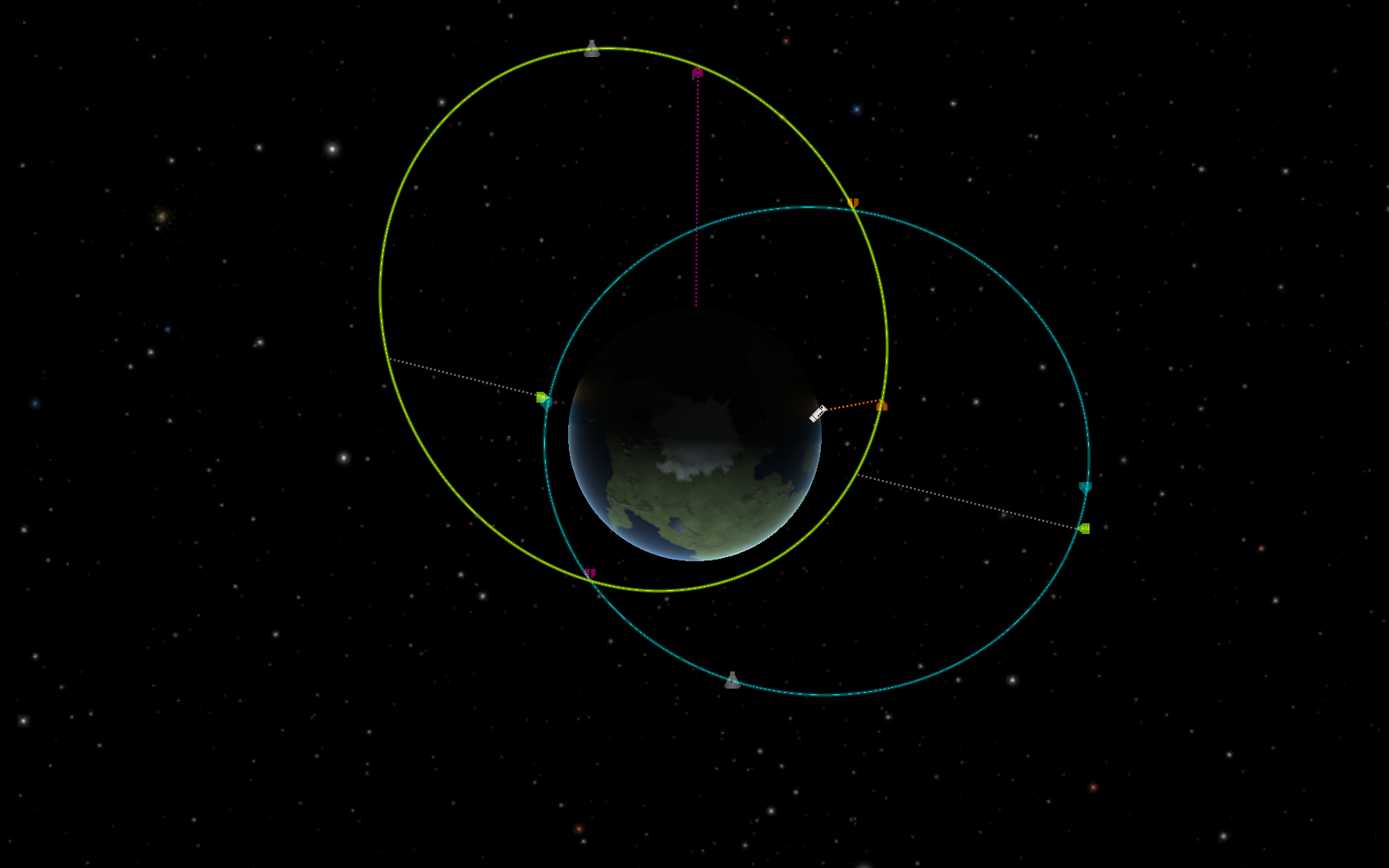
Рис 23. Общий вид. Наклон устранен.
В данном случае орбиты распложены как лепестки цветка. В такой ситуации довольно выгодно перепрыгнуть с вершины одного лепестка прямо на вершину другого лепестка. То есть из одного апоцентра в другой апоцентр. Для этого планируем маневр вблизи нашего апоцентра. Подбираем точку пересечения, работая зелеными и голубыми векторами. Это не так просто сделать, потому что в этом случае, из-за крайне неравномерного движения цели (скорость в апоцентре сильно отличается от скорости в перицентре), очень большое влияние на результат оказывает место выполнения маневра. Подбираем минимально возможное расстояние пусть даже в несколько сот километров.

Рис 24. Несколько сотен километров разницы, ближе не удается.
А затем перемещаем планировщик вдоль траектории чтобы получить большую точность. Для этого двигаем его за центральный кружок. Точки почти сразу сходятся. Однако меньше 6,7 км получить все равно не удается.
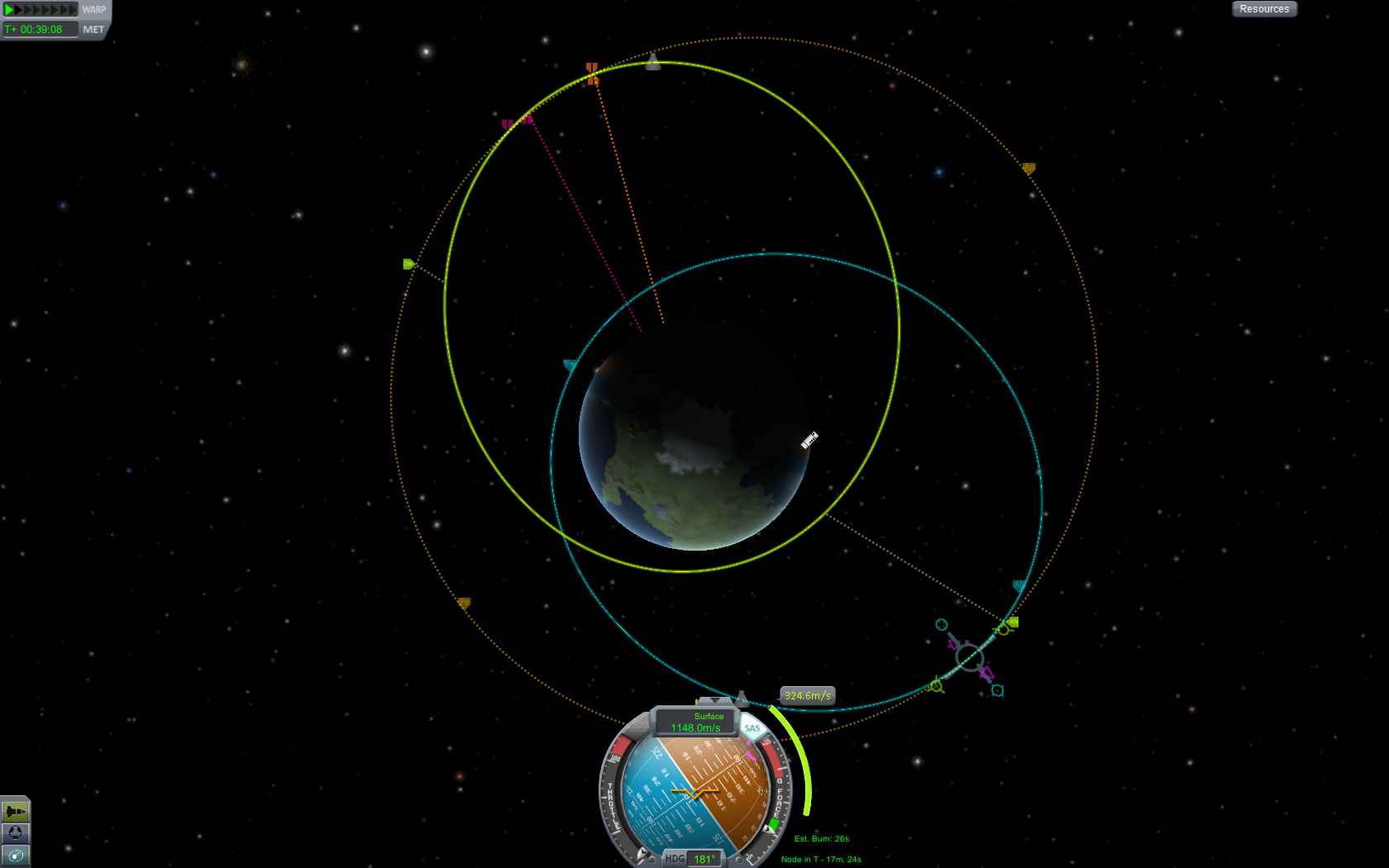
Рис 25. Смещение точки выполнения маневра приводит к почти минимальному удалению цели.
Смотрим на карту с другой стороны, увеличиваем масштаб и подгоняем точно точку пересечения. Получаем 500 метров – весьма неплохо для сближения двух объектов удаленных на несколько тысяч километров друг от друга и двигающихся со скоростями от 1,1 до 2,5 км/с.
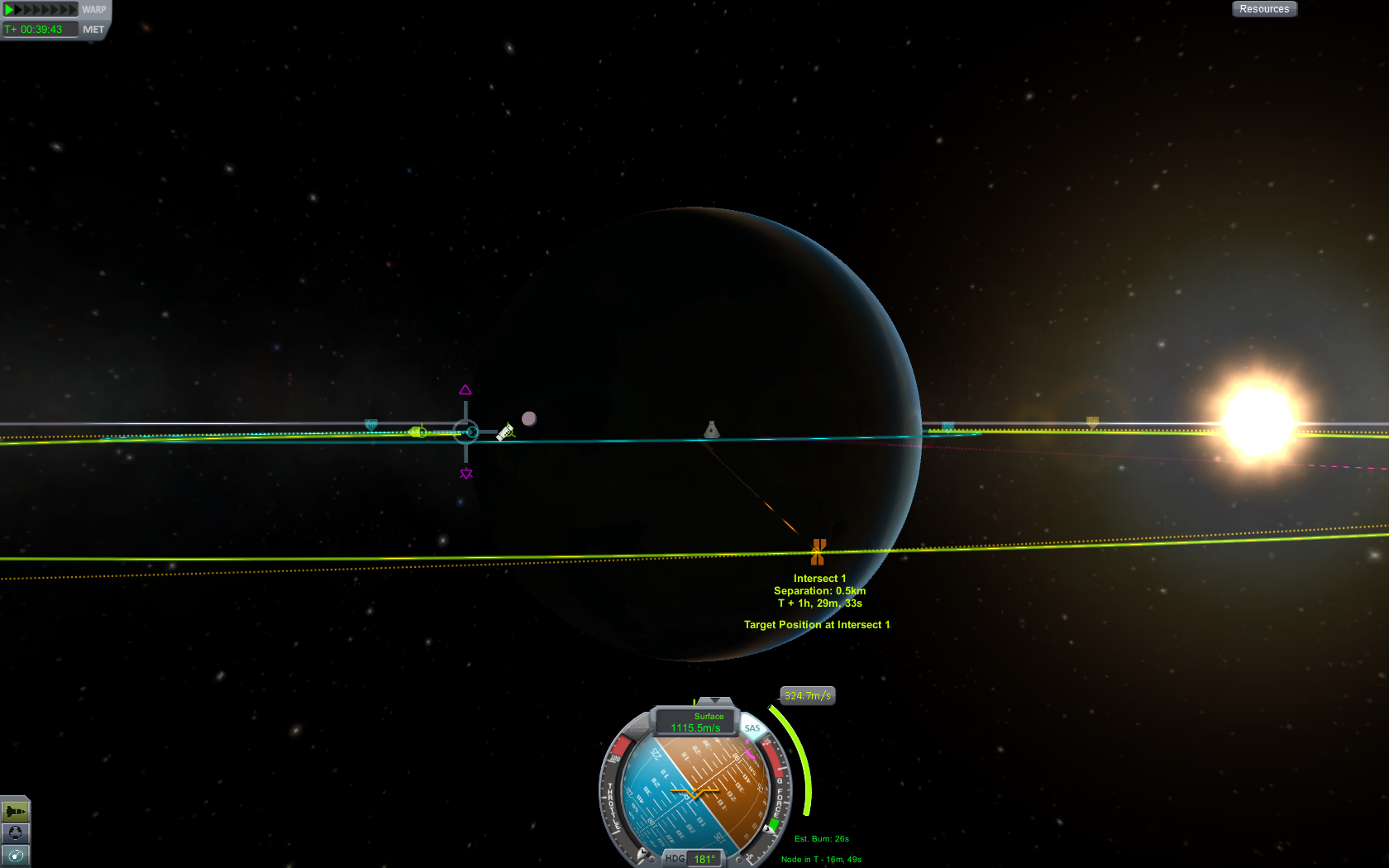
Рис 26. Точное совмещение точки пересечения.
Нас это вполне устраивает, выполняем маневр перехода. А затем, после выполнения маневра и исправления траектории с помощью RCS, создаем финальный маневр прямо в точке пересечения, планировщиком совмещаем орбиты, выполняем финальный маневр. Как и в прошлый раз, в построении финального маневра нет большой необходимости и нужно больше для оценки требуемой ΔV, и расчета точного момента включения двигателя. При выполнении маневра также лучше ориентироваться на ретроградный вектор и стараться уменьшить скорость относительно цели до 0.
Второй способ представляется мне более универсальным. Если внимательно посмотреть на Рис 18, то очевидно, что не будет сложным выдать импульс в районе апоцентра, и на участке схождения угол между траекториями не будет большим, даже при различных траекториях подхода.
d. Резюме.
Общая последовательность действий приблизительно такая:
1) Устранение относительного наклонения орбит;
2) Поиск или создание точки пересечения. Удаление не имеет значения;
3) С помощью маневра в этой точке пересечения создание новой точки пресечения с удалением меньше одного километра;
4) Гашение относительной скорости в новой точке и, как следствие, переход на орбиту цели.
Для круглых орбит:
1) Устранение относительного наклонения орбит;
2) Поиск или создание точки пересечения;
3) Выполнение маневра сведения;
a. Если цель позади, то пропускаем цель, поднимая апоцентр импульсом в проградном направлении;
b. Если цель впереди, то догоняем цель, опуская апоцентр импульсом в ретроградном направлении;
c. Можно выполнять сведение, за несколько витков подбирая частоту прохода точки встречи;
4) Гашение относительной скорости в точке встречи и, как следствие, переход на орбиту цели.
7. Стыковка.
a. Относительные движения аппаратов.
В этом разделе описаны типовые взаимные расположения кораблей, направления движения и отображение этого на навболе.
На навболе в процессе игры отображаются следующие значки:
Таблица 1.
Индикатор направления носа корабля
Проградный вектор
Ретроградный вектор
Вектор направления «На цель»
Вектор направления «От цели»
Вектор направления выполнения маневра
Полное описание маркеров вы можете прочитать в соответствующих руководствах. Для нас же имеют наибольшее значение проградный и ретроградный маркеры, а также то каким образом можно управлять их движением и соответственно движением корабля. Перейдем к описанию взаимных расположений маркеров и соответствующих движений кораблей:
Таблица 2.
Проградный маркер
J смещает КА и маркер влево.
L смещает КА и маркер вправо;
I смещает КА и маркер вниз;
K смещает КА и маркер вверх;
H увеличивает скорость КА, если маркер не совпадает с индикатором, то вызывает небольшое смещение маркера к индикатору;
N уменьшает скорость КА, если маркер не совпадает с индикатором, то вызывает небольшое смещение маркера от индикатора.
Ретроградный маркер
J смещает КА и маркер вправо.
L смещает КА и маркер влево;
I смещает КА и маркер вверх;
K смещает КА и маркер вниз;
H увеличивает скорость КА, если маркер не совпадает с индикатором, то вызывает небольшое маркера смещение от индикатора;
N уменьшает скорость КА, если маркер не совпадает с индикатором, то вызывает небольшое смещение маркера к индикатору.
Теперь рассмотрим, как связаны показания навбола и взаимное расположение маркеров с положением и маневрированием кораблей. Основные случаи приведены в Таблице 3.
Таблица 3.
Случай 1
<!--dle_image_begin
-
 lllypa
lllypa - 21 ноя 2013 в 18:45
- 140 939
- 51

Составной ССТО Mark 0204
3 фев 2016 в 07:36,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии


Последние сообщения с форума

Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt