
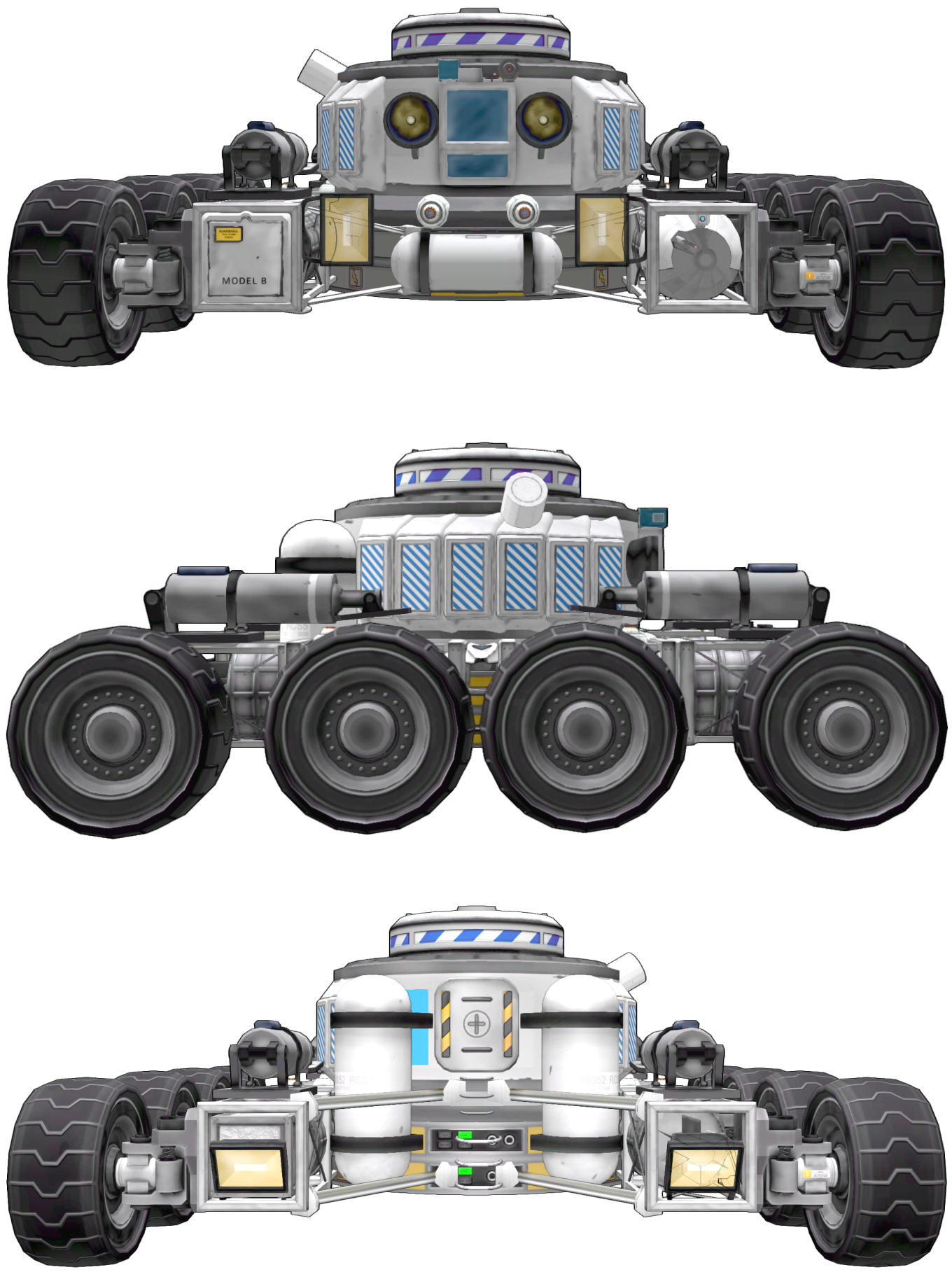
Представляю вашему вниманию простой как три копейки и удобный в обращении планетоход, подходящий для путешествий на многих объектах, как с атмосферой, так и без. В ходе испытаний было выявлено, что данное изделие очень хорошо ведёт себя на 8 планетах и спутниках: Мун, Мохо, Ив, Дюна, Лэйт, Валл, Тайло и Илу. В принципе, если активно пользоваться RCS-движками, время от времени прижимая его к поверхности, то вполне сносно будет управляться на Айке и Дрес (запас хода, таким образом, разумеется, будет ограничен имеющимся на борту топливом).
Мои первые роверные экспедиции показали, что в условиях слабой гравитации совершенно неизбежны опрокидывания даже при передвижении по относительно гладкой поверхности, а вследствие них поломки оборудования, выход ровера из строя и даже гибель кербонавтов. Бороться с этим явлением было бесполезно, посему была воплощена конструкция, которая способна выдерживать практически любые коллизии и сводящая к минимуму вероятность поломок аппаратуры.
В случае опрокидывания на крышу, планетоход может без помощи кербонавтов встать обратно на колёса с помощью RCS-двигателей.

Экипаж ровера состоит из одного или двух кербонавтов, но может быть использован и в качестве автономного беспилотного аппарата (в этом случае сломанные колёса чинить будет некому, посему управляться с ним придётся гораздо осторожнее). Во время движения кербонавты находятся в капсуле, которая защищает их от ударов о грунт.
Основную защитную функцию несут четыре опоры, размещённые попарно спереди и сзади. Вместе с колёсами они принимают на себя всю тяжесть ударов при опрокидываниях и падениях с крутых обрывов. Благодаря им конструкция может выдерживать столкновения с поверхностью на скоростях до 30 м/с (возможно, и больше, это зависит от гравитации).
Схема из восьми широкопрофильных колёс обеспечивает надёжное сцепление, достаточно плавный ход и общую прочность подвески. Всё это существенно упрощает управление и делает его даже весьма комфортным. Планетоход хорошо ведёт себя и позволяет корректировать курс на небольшие углы при скорости 20-25 м/с; мой рекорд на спуске со склона без последующего необратимого разрушения - 50 м/с. Этот ровер был первым, на котором я проделал путешествие на расстояние 200 км (100 км от места высадки и столько же обратно). Уехал бы и дальше, если б не надоело бесконечно давить на "W" :)
Вышесказанное, разумеется, не означает, что любой человек сможет запросто управляться с этим чудом техники. Опыт обращения с планетоходами для него тоже требуется.


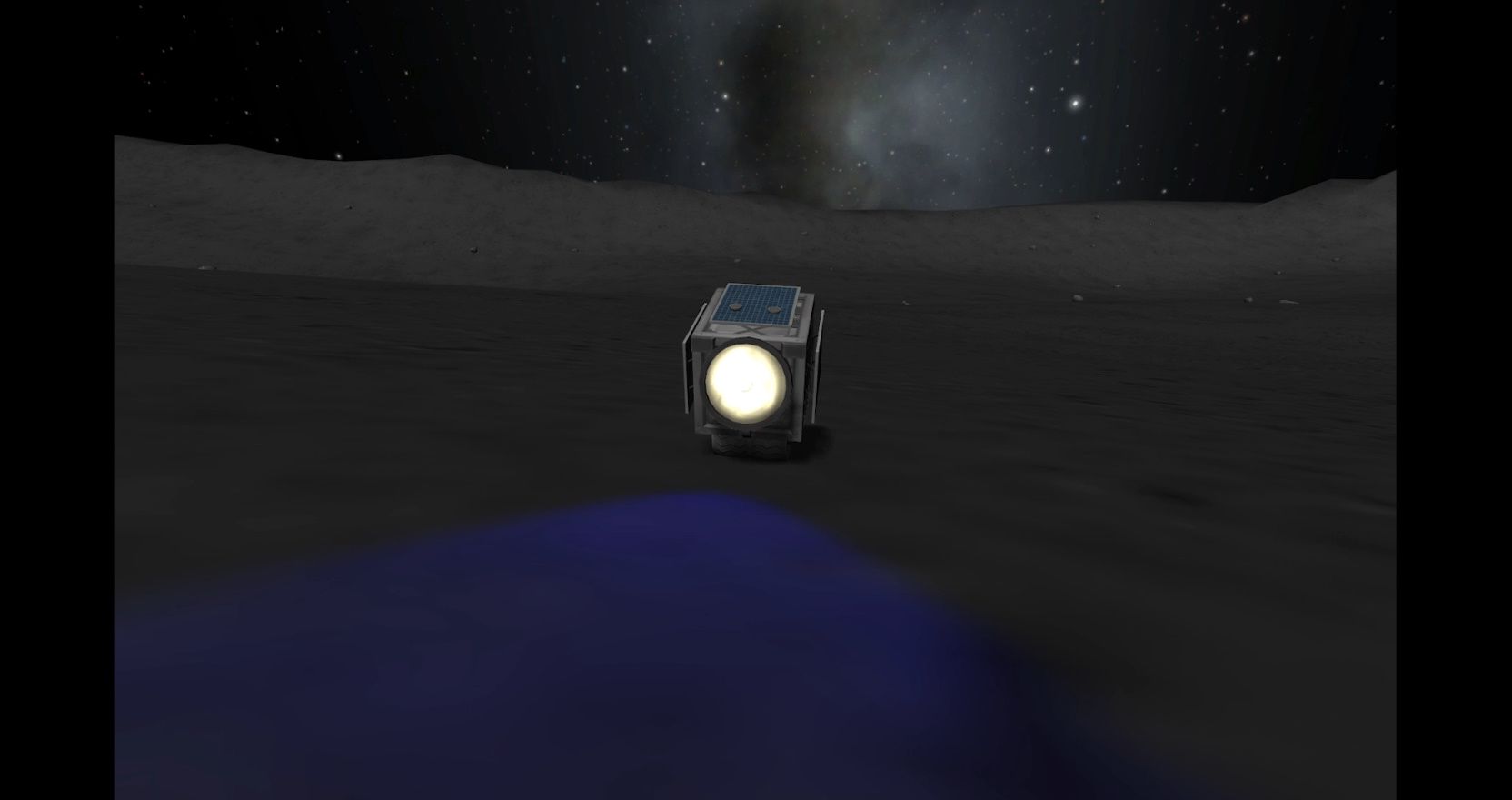
Потребление электроэнергии, если все восемь колёс ведущие - 291 ед./мин. При включенном освещении - 300,6 ед./мин. Таким образом, запаса батарей (с учётом работы генератора) хватает, минимум, на полчаса движения, после чего им потребуется подзарядка. Для этого ровер оснащён, как было сказано, генератором, а так же солнечной панелью, которую можно развернуть для ускорения зарядки. В походном режиме эта панель сворачивается.
Ровер совершенно не зависит от наличия на небосклоне Солнца, можно вполне комфортно передвигаться даже в ночное время суток.

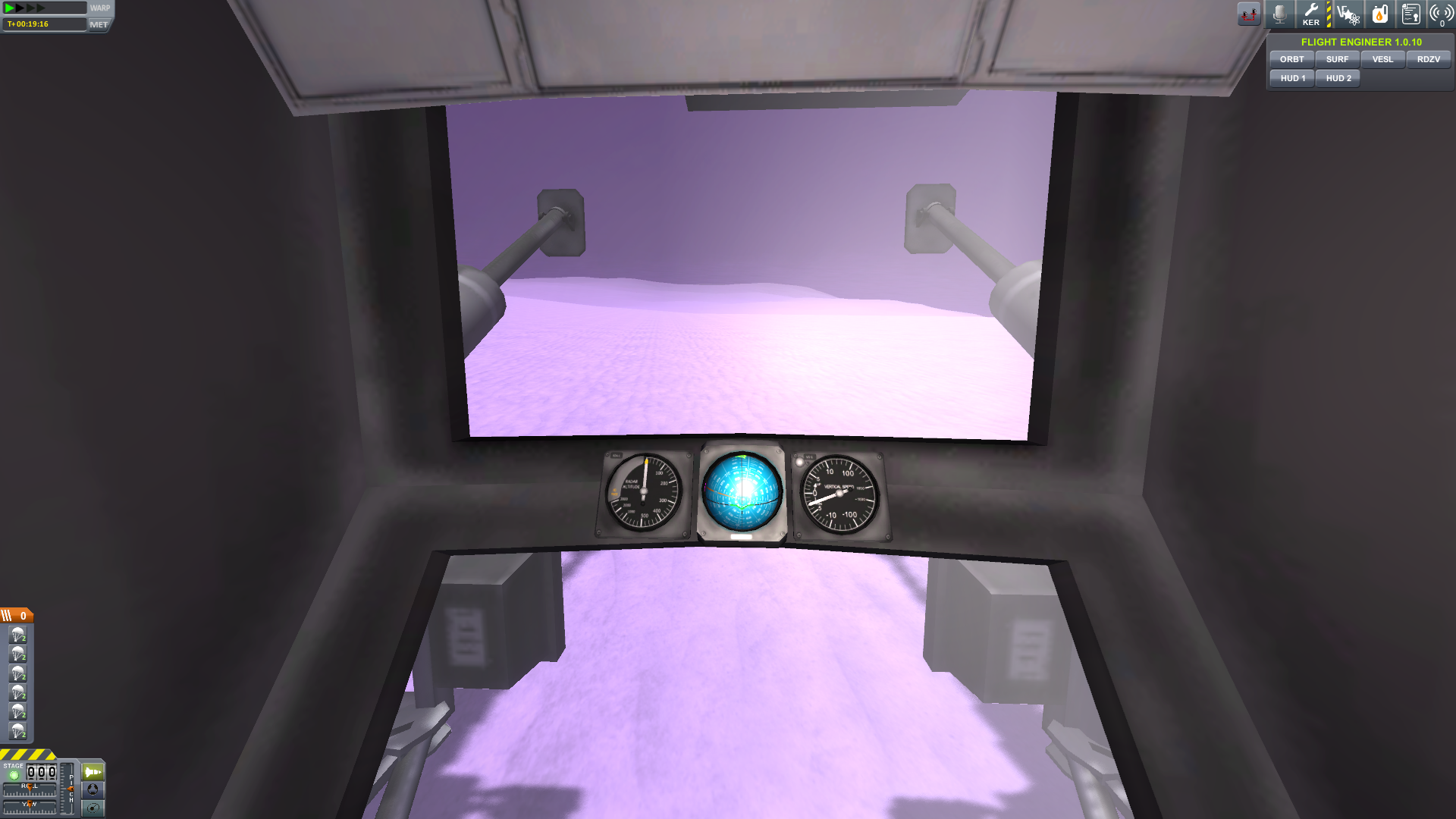
Можно и из кабины порулить, прямо как в автосимуляторе :)
Помимо капсулы с кербонавтами, полезную нагрузку планетохода составляют научное оборудование и антенна. Вся аппаратура, кроме контейнера со слизью, многоразовая.

Характеристики:
- Экипаж: 0-2;
- Снаряженная масса: 9 909 кг;
- Количество деталей: 91;
- Запас батарей: 8110 ед.;
- Запас монотоплива: 340 ед.;
- запас жидкого топлива/окислителя: 91,8/112 ед.
Сравнительные размеры:

Из существенных минусов могут отметить очень заниженный клиренс. Из-за этого одна батарея под капсулой может уничтожиться при перекатах вдоль гребней холмов. Однако, со мной такое случалось только в тестовых заездах, на "боевых" вылетах аппарат показал себя отлично и ничего внештатного с ним не случилось.
-
 Dequade
Dequade - 2 ноя 2014 в 16:28
- 7 002
- 6
One-eyed
27 сен 2014 в 12:56,
Ионный гравитационный ровер
19 мая 2014 в 20:16,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
Как сделать облака и на других планетах по типу Евы или джула. И как сделать так чтобы на дюне были
Kerbal Space Program (KSP) 1.12.5 скачать - "On Final Approach" + DLC
тут хотя бы не троян?
[РУСИФИКАТОР] KSP 1.0.x
Спасибо огромное на финальной версий 1.12.5 всё переведено идеально
Параллельный импорт EVE Raymarched Volumetrics - RSS "Облака планеты Земля"
я видеокарта gtx660 мод потянет?

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума

Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt