Сама идея возникла еще в версии 0.19, но получившиеся конструкции были слишком нелепы или неэффективны.В ARM это стало возможным так как ионный двигатель получил вчетверо большую тягу, а потребление электричества на единицу топлива уменьшилось. Вернуться к этой задумке меня заставил стрим Spacespirit, на котором снова увидел проблемы легких роверов при низкой гравитации.
Итак, принцип действия прост, аппарат имитирует притяжение к поверхности, благодаря чему увеличивается трение колес (читай прекращается скольжение). Достигается это путем приложения усилия к центру масс, направленного, разумеется, вниз. Косвенно это же увеличивает стабильность и несколько препятствует переворотам.
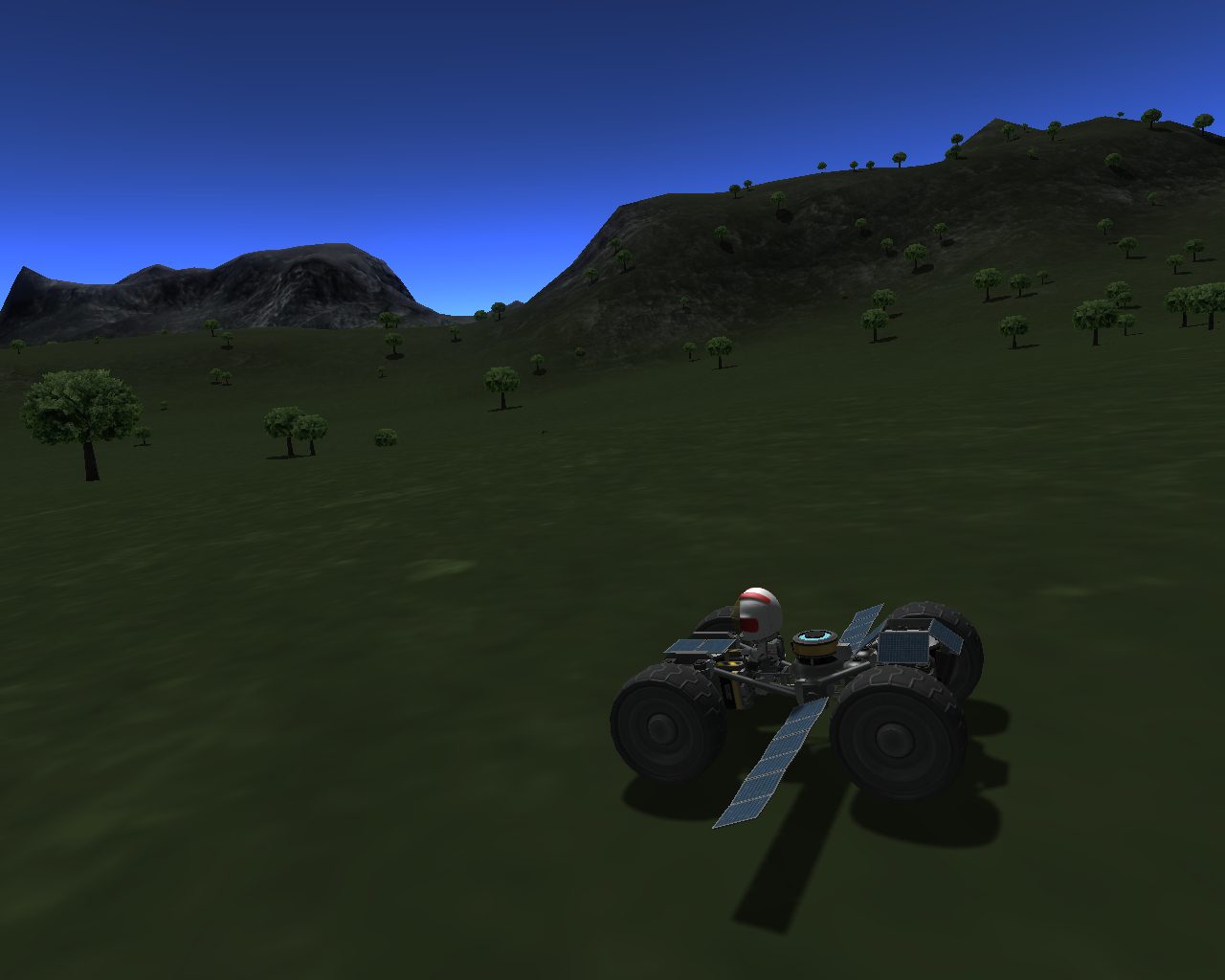
Предшественник этого ровера, более ранняя модель, тестировался на Минмусе. Где показал себя просто превосходно. Финальную же версию я никуда не повез (ибо лень), поэтому тестировал на Кербине, просто отключив гравитацию полностью. Меня результат более чем устроил.
Ровер имеет довольно низкий центр масс, но, как и все роверы с малой массой, боится резких поворотов на скоростях. "Вооружен" парой складных панелей, для более шустрого заряда батарей от Кербола. На безатмосферных объектах их можно и вовсе не закрывать. Два модуля управления призваны обеспечить приемлемый контроль над ровером в случае отрыва от поверхности. Аппарат был тщательно отбалансирован, при выработке топлива смещение центра масс не доставляет ощутимых неудобств. (ВНИМАНИЕ!, балансировка проводилась с учетом массы кербонавта к кресле, без которого ровер будет иметь несколько иные показатели стабильности)
Характеристики:
46 деталей
Масса - 785кг
На борту ~3900 DeltaV
Ксенон - 800, что соответствует 27-минутам работы двигателя на полной тяге.
1420 - бортовой электрозаряд. (А вот нефиг по ночам ездить! :D)
Управление:
1 - развернуть/свернуть солнечную панель
2 - отключить/включить Reaction Wheels в обоих модулях управления
3 - включить/выключить ионный двигатель
"U" - включить/выключить фонари


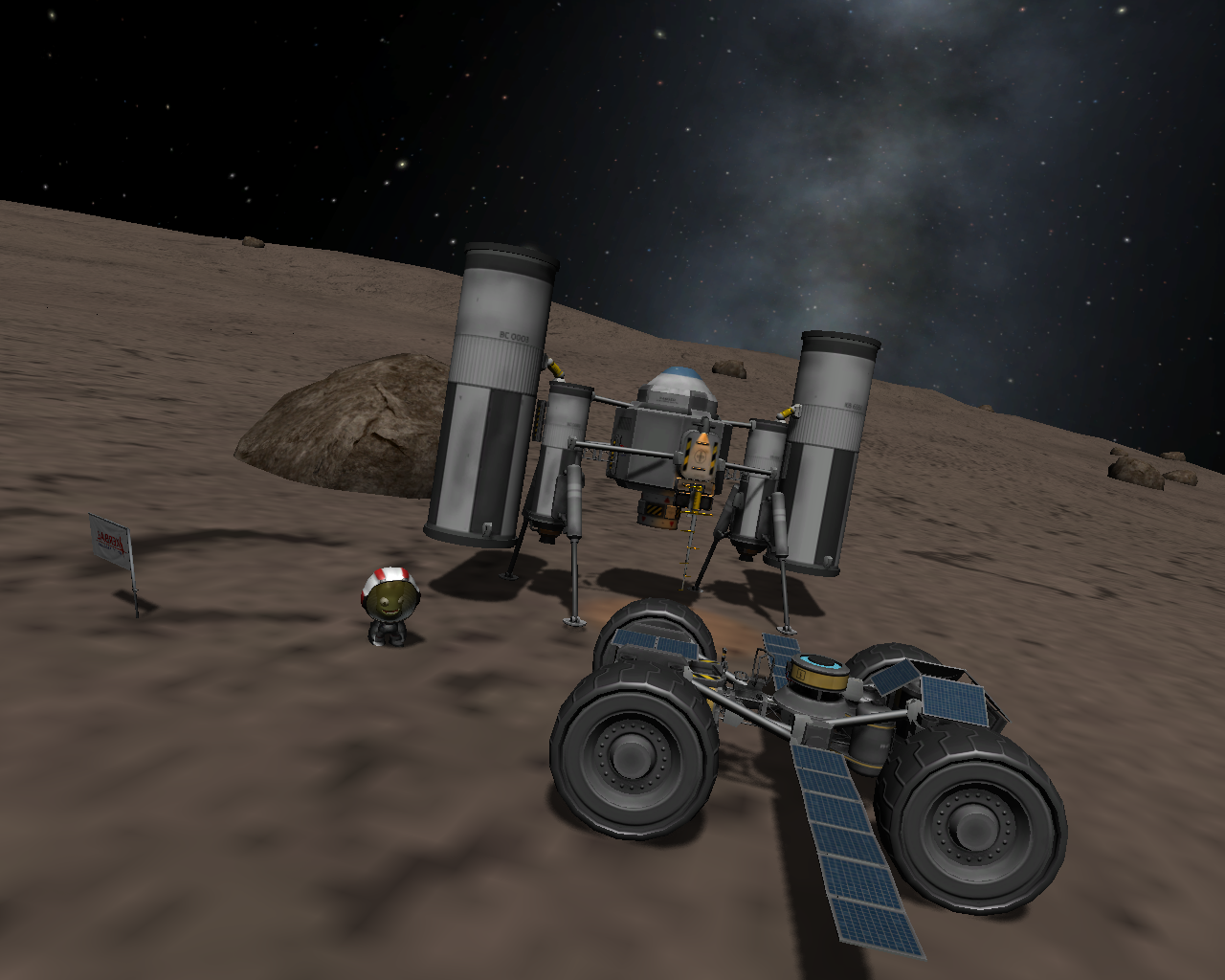
P.S. И все же руки дотянулись и я его потестил в "боевых" уже условиях, а именно на Джилли, спутнике Ив. Насколько я помню, это объект с самой низкой гравитацией. Если кто пробовал должны быть в курсе, что ездить там совершенно невозможно, как и ходить. Но ради подобных условий ровер и создавался. Что ж, кратко могу сказать так: аппарат хорош, особенно если научиться правильно его использовать. Есть незначительные претензии к конструкции, но капризничать я не стал. Ровер, пилотируемый Бобом Керманом, успешно объехал Джилли по кругу, от лендера направился на Северо-Запад, прибыл к лендеру, соответственно, с Юго-Востока. Иногда позволял себе затяжные прыжки. При таких условиях конструкция позволяет даже летать, аки ракета, но задача стояла другая.
В любом случае, миссия завершена успешно! Боб вернулся домой, ровер с выработанным топливом остался как памятник стоять у флага.
Одобряю собственное изобретение :D
Ну и конечно парочка скринов:


P.P.S Не хватило буквально 2 галлона ксенона, но это не помешало. Из-за грубой ошибки (в процессе обучения) сломал переднюю фару.
-
 Kermaniac
Kermaniac - 19 мая 2014 в 20:16
- 6 406
- 11

Самый практичный ровер "ACURA"
28 июл 2013 в 11:30,
Ионный двигатель NEXT: более 5 лет работы без сбоев
1 июл 2013 в 14:29,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
Как сделать облака и на других планетах по типу Евы или джула. И как сделать так чтобы на дюне были
Kerbal Space Program (KSP) 1.12.5 скачать - "On Final Approach" + DLC
тут хотя бы не троян?
[РУСИФИКАТОР] KSP 1.0.x
Спасибо огромное на финальной версий 1.12.5 всё переведено идеально
Параллельный импорт EVE Raymarched Volumetrics - RSS "Облака планеты Земля"
я видеокарта gtx660 мод потянет?

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума


Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt