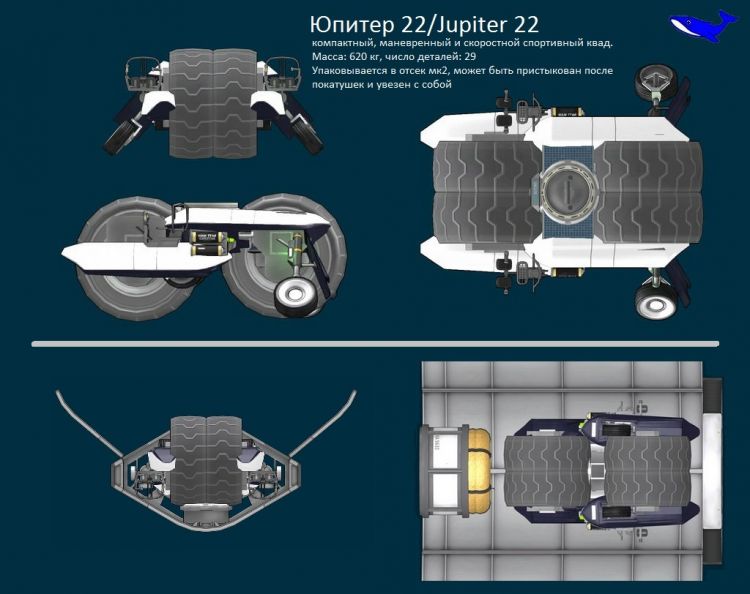
После появления новых грузовых трюмов инженеры компании довольно быстро соорудили компактный ровер с возможностью размещения в них. Но он обладал массой недостатков: малая скорость, плохая управляемость, низкая стойкость к падениям. Поэтому после серии мозговых штурмов и накачки от начальства был создан этот образец инженерного искусства - спортивный ровер-квадроцикл "Юпитер-22" оснащенный новейшей системой активной стабилизации:
ТТХ:
Масса - 0.62т; Число деталей: 29;
Запас электричества: 210 ед; Источники электропитания: 2 РИТЭГа + пара малых солнечных панелей;
Предельная скорость: 60 м/с (предел прочности колес)
Распаковка/упаковка и тренировочно-испытательный заезд в комцентре
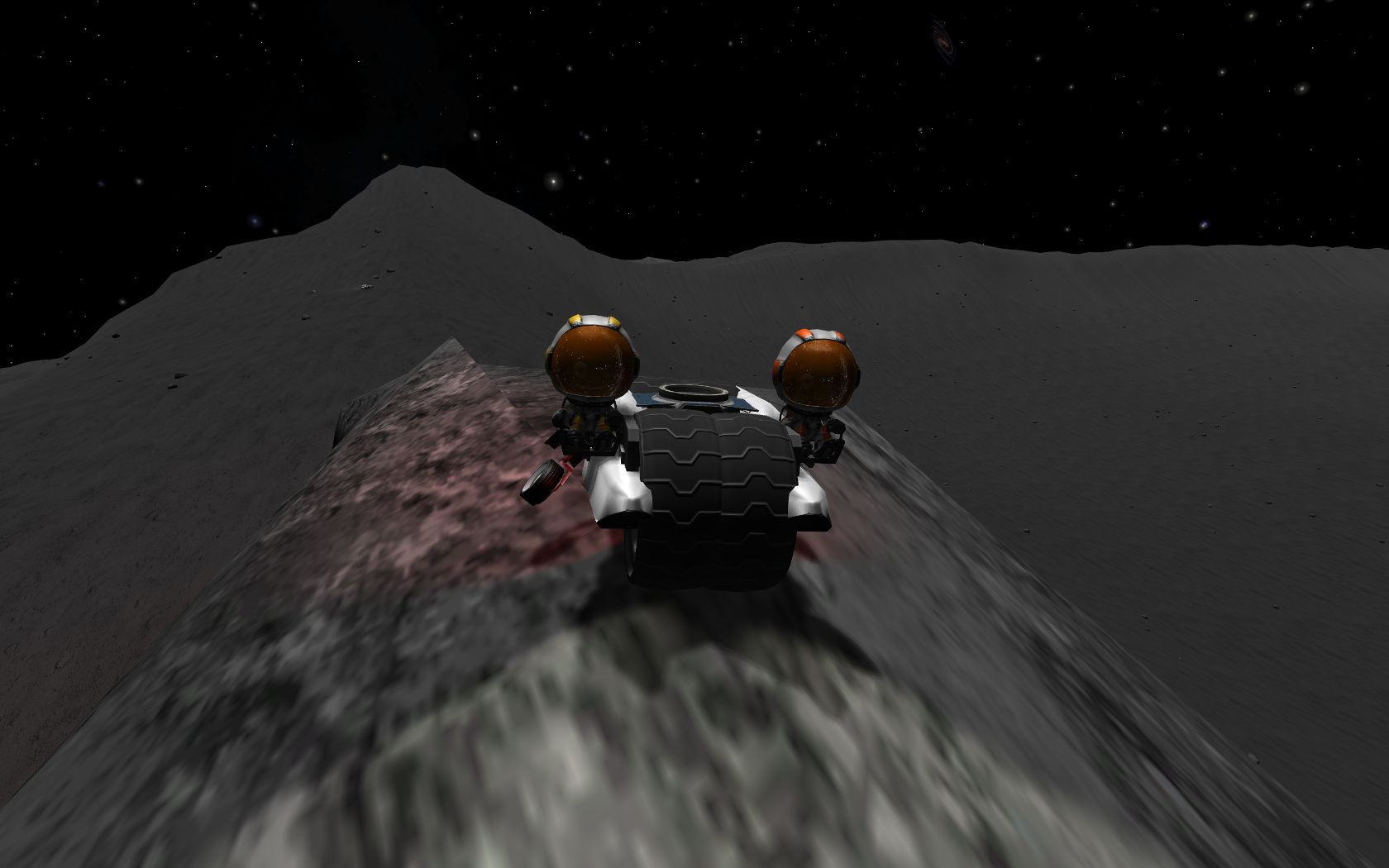
Испытательные заезды: Муна(успешный штурм мунной арки), Дрес, Дюна:
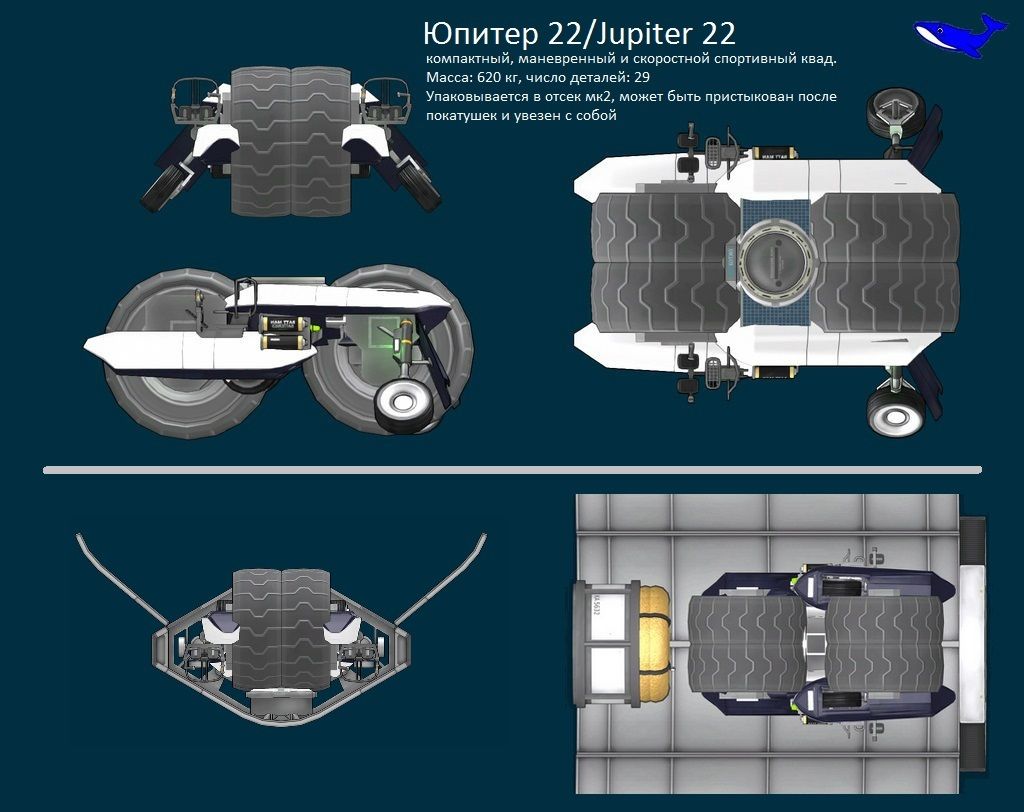
Сам агрегат + две субсборки (просто ровер с узлом крепления и он же упакованный в грузовой отсек мк2):
ТТХ:
Масса - 0.62т; Число деталей: 29;
Запас электричества: 210 ед; Источники электропитания: 2 РИТЭГа + пара малых солнечных панелей;
Предельная скорость: 60 м/с (предел прочности колес)


Распаковка/упаковка и тренировочно-испытательный заезд в комцентре
Испытательные заезды: Муна(успешный штурм мунной арки), Дрес, Дюна:
Сам агрегат + две субсборки (просто ровер с узлом крепления и он же упакованный в грузовой отсек мк2):
-
 Mesklin
Mesklin - 22 ноя 2014 в 07:10
- 5 408
- 26

Роверок+рн
4 фев 2016 в 11:48,
Ленд-ровер "Диоген"
29 авг 2015 в 02:11,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
Как сделать облака и на других планетах по типу Евы или джула. И как сделать так чтобы на дюне были
Kerbal Space Program (KSP) 1.12.5 скачать - "On Final Approach" + DLC
тут хотя бы не троян?
[РУСИФИКАТОР] KSP 1.0.x
Спасибо огромное на финальной версий 1.12.5 всё переведено идеально
Параллельный импорт EVE Raymarched Volumetrics - RSS "Облака планеты Земля"
я видеокарта gtx660 мод потянет?

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума

Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt