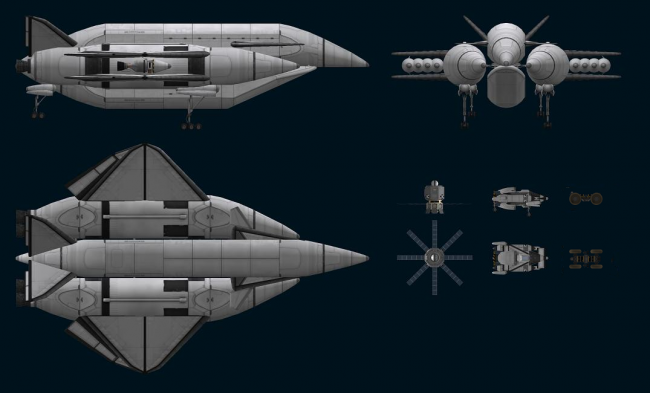
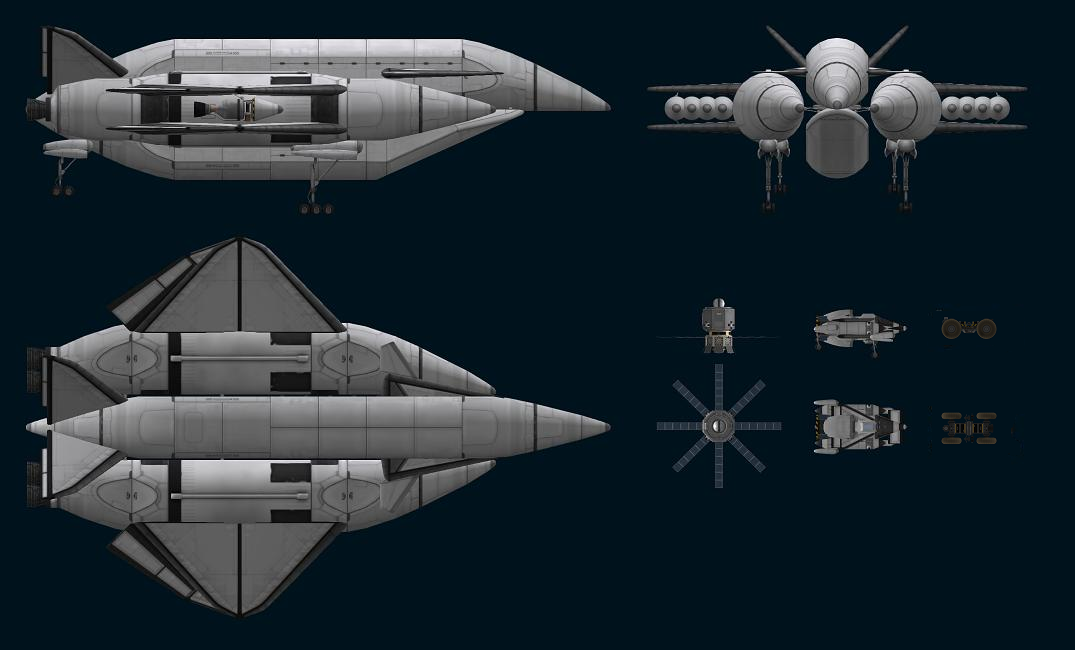
Pelican Mk1p
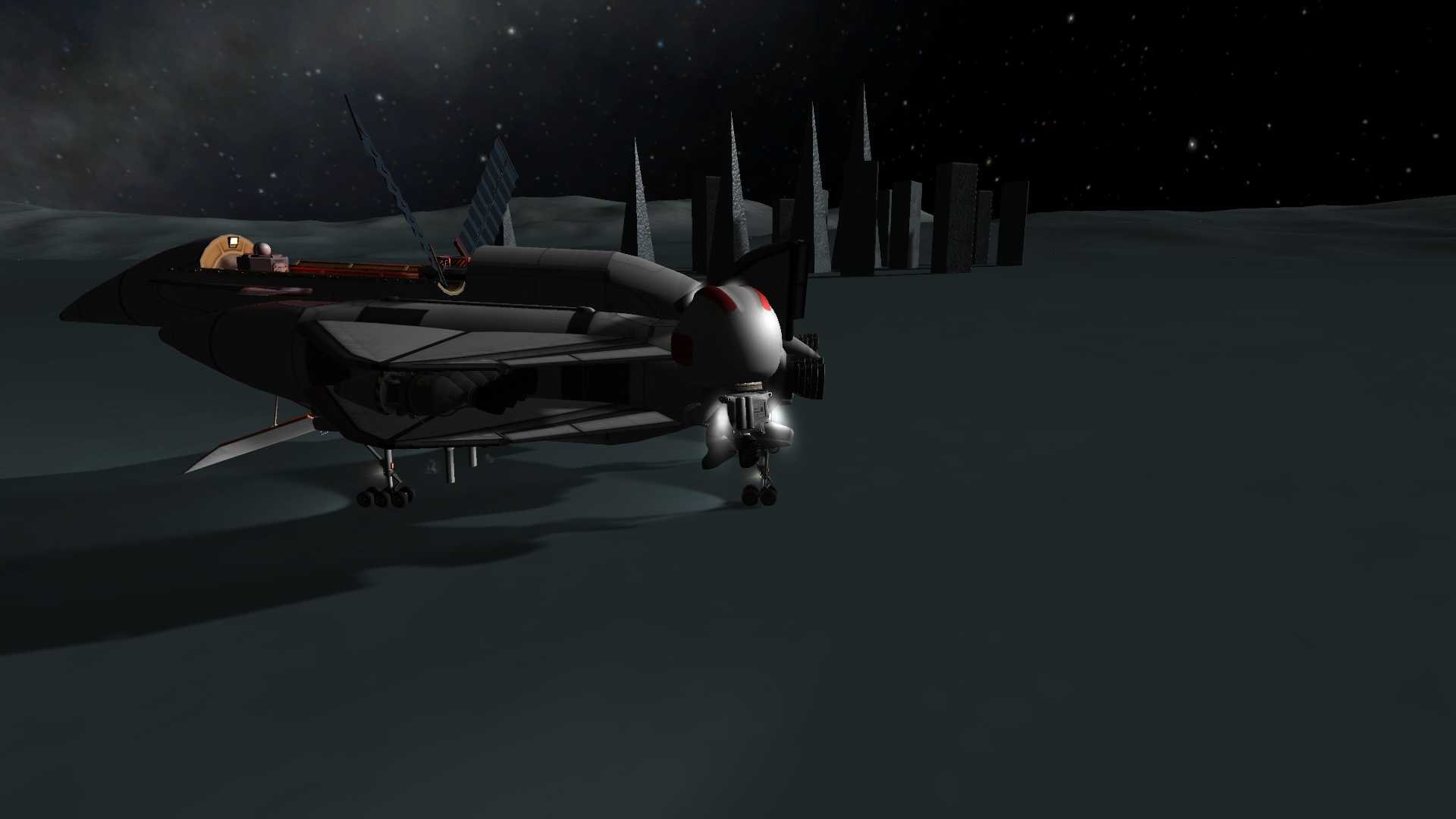
Данный аппарат предназначен для посадки и дальнейшего исследования Mun, Minmus, Gilly, Dune, Ike, Dres, Laythe, Vall, Bop, Pol. На борту имеется два челнока и ровер. Ионный челнок предназначен для облета безатмосферных лун с низкой гравитацией, а атмосферный соответственно для Кербина и Лейт. Экипаж состоит из трех пилотов и двенадцати пассажиров.
Характеристики:
Максимальная масса - 507 тонн
Сухая масса - 133 тонны
Максимальная дельта V ядерных двигателей - 5424 м/с
Экипаж - 15 кербонафтов
Клавиши управления:
1 - Вкл/Откл основные ходовые двигатели (Векторы)
2 - Вкл/Откл ядерные двигатели
3 - Откр/Закр солнечные панели ионного челнока
5 - Откр/Закр верхний грузовой отсек
6 - Опустить/Поднять трап ровера
7 - Откр/Закр грузовой отсек с бурами
8 - Бурение
9 - Выдвинуть/Сложить бур
0 - Откр/Закр основные солнечные панели (не забудьте открыть верхний грузовой отсек)
Взлет с Кербина:
Передать управление командному отсеку в нижнем трюме (этот баг я так и не поборол)
Взлет с конца полосы, после отрыва наклон 30~35 градусов.
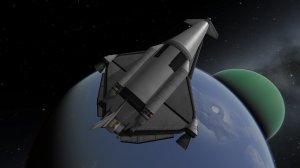
На высоте ~30 км скорость должна быть ~1100 м/с. Держим нос аппарата по вектору движения (нажмите кнопку "Prograde").
Когда апогей достигнет ~100 км отключаем двигатели и при выходе в космос формируем желаемую орбиту. После формирования орбиты остается ~1700 м/с, что достаточно для полета и посадки на Минмус и дальнейшей дозаправки
Посадка на Кербин/Лейт:
Посадка с пустыми баками в режиме планирования (излишки топлива сжечь). Аппарат довольно стабилен в верхних слоях атмосферы и отлично сбрасывает скорость тормозя "пузиком". Оптимальная скорость, перед касанием шасси, ~80 м/с.
Посадка на Дюну и безатмосферные планеты/луны:
Посадка на "хвост" и торможение двигателями. Перед касанием разворот для посадки на шасси.
Взлет:
Для взлета необходимо найти подходящий холм и подъехать к его склону. Для выполнения поворотов на поверхности, рекомендуется включать правый или левый двигатель в ручном режиме.
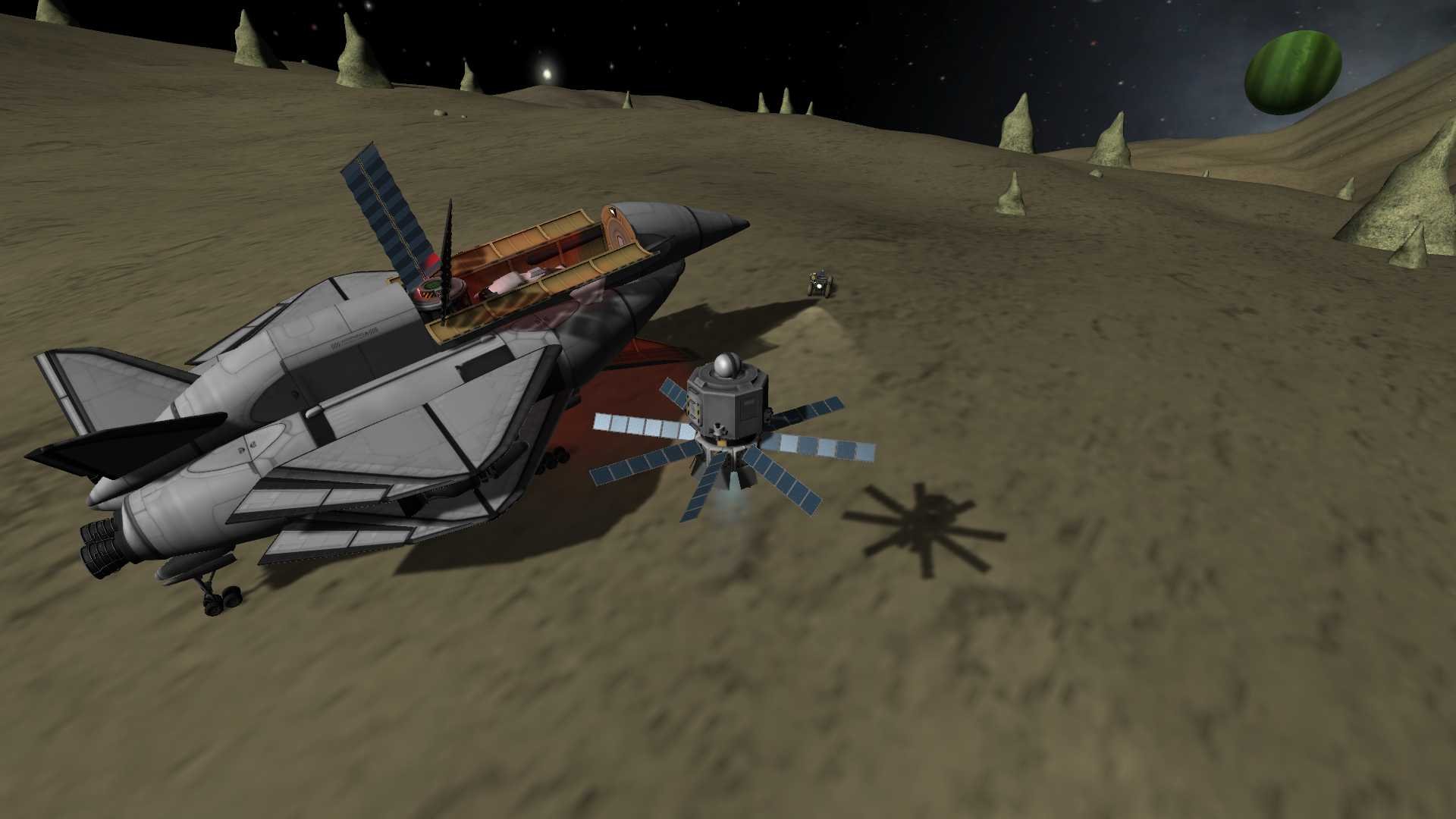
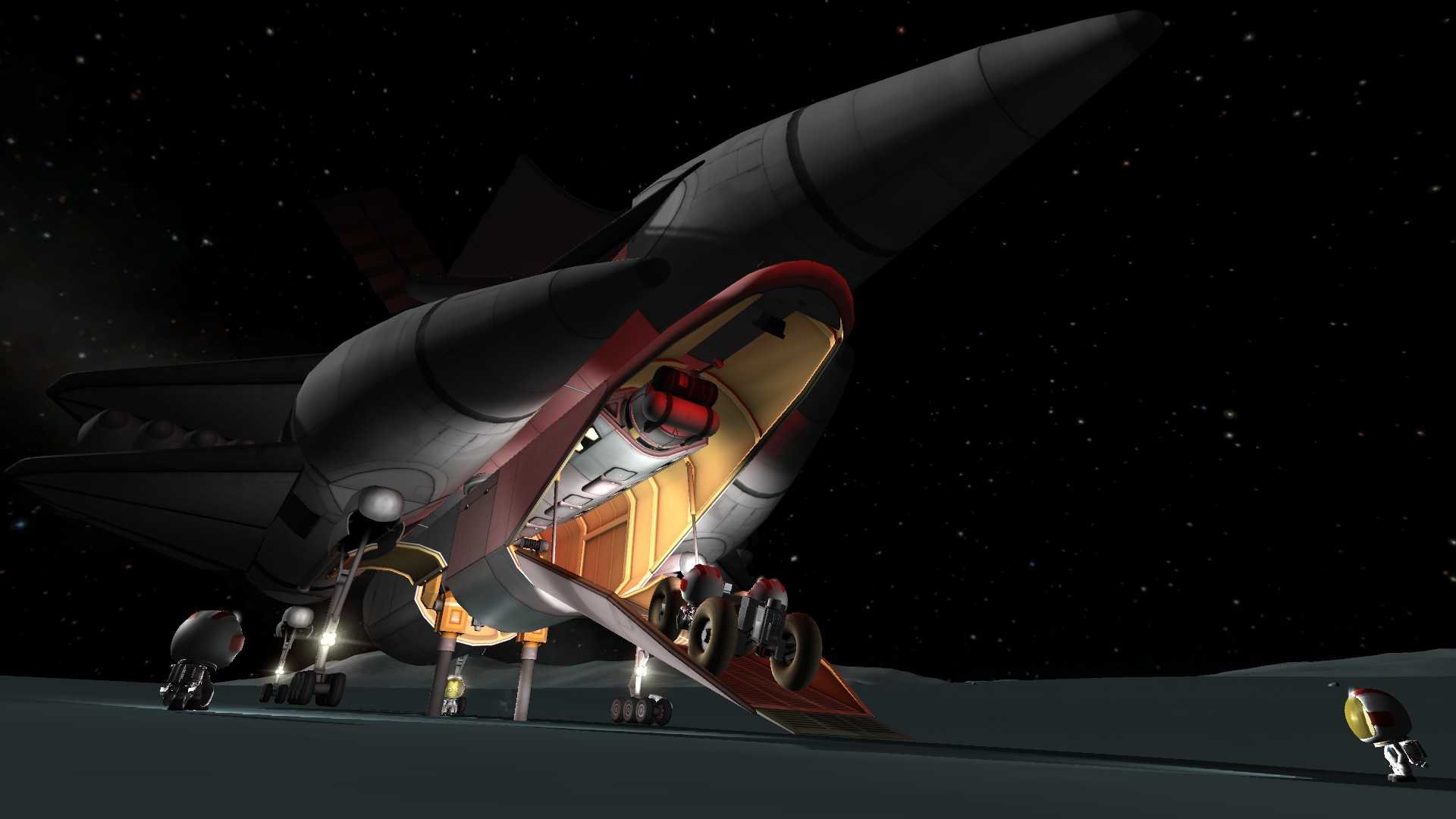
Ровер:
Ровер укомплектован SAS-модулем, что добавляет ему стабильности при перемещении на больших скоростях, а также позволяет перевернуть при опрокидывании. Для удобства панель SAS-модуля рекомендуется зафиксировать на экране, для оперативого включения/отключения его. После отстыковки от док-порта, следует включить SAS, наклонить ровер и на двух колесах проехать вперед. После этого отключить его, выровнять ровер и съехать по трапу. При разгоне ровера, на лунах с низкой гравитацией, рекомендуется отключать SAS-модуль, во избежание опрокидывания.
Изображения:
Характеристики:
Максимальная масса - 507 тонн
Сухая масса - 133 тонны
Максимальная дельта V ядерных двигателей - 5424 м/с
Экипаж - 15 кербонафтов
Клавиши управления:
1 - Вкл/Откл основные ходовые двигатели (Векторы)
2 - Вкл/Откл ядерные двигатели
3 - Откр/Закр солнечные панели ионного челнока
5 - Откр/Закр верхний грузовой отсек
6 - Опустить/Поднять трап ровера
7 - Откр/Закр грузовой отсек с бурами
8 - Бурение
9 - Выдвинуть/Сложить бур
0 - Откр/Закр основные солнечные панели (не забудьте открыть верхний грузовой отсек)
Взлет с Кербина:
Передать управление командному отсеку в нижнем трюме (этот баг я так и не поборол)
Взлет с конца полосы, после отрыва наклон 30~35 градусов.
На высоте ~30 км скорость должна быть ~1100 м/с. Держим нос аппарата по вектору движения (нажмите кнопку "Prograde").
Когда апогей достигнет ~100 км отключаем двигатели и при выходе в космос формируем желаемую орбиту. После формирования орбиты остается ~1700 м/с, что достаточно для полета и посадки на Минмус и дальнейшей дозаправки
Посадка на Кербин/Лейт:
Посадка с пустыми баками в режиме планирования (излишки топлива сжечь). Аппарат довольно стабилен в верхних слоях атмосферы и отлично сбрасывает скорость тормозя "пузиком". Оптимальная скорость, перед касанием шасси, ~80 м/с.
Посадка на Дюну и безатмосферные планеты/луны:
Посадка на "хвост" и торможение двигателями. Перед касанием разворот для посадки на шасси.
Взлет:
Для взлета необходимо найти подходящий холм и подъехать к его склону. Для выполнения поворотов на поверхности, рекомендуется включать правый или левый двигатель в ручном режиме.
Ровер:
Ровер укомплектован SAS-модулем, что добавляет ему стабильности при перемещении на больших скоростях, а также позволяет перевернуть при опрокидывании. Для удобства панель SAS-модуля рекомендуется зафиксировать на экране, для оперативого включения/отключения его. После отстыковки от док-порта, следует включить SAS, наклонить ровер и на двух колесах проехать вперед. После этого отключить его, выровнять ровер и съехать по трапу. При разгоне ровера, на лунах с низкой гравитацией, рекомендуется отключать SAS-модуль, во избежание опрокидывания.
Изображения:


[media=www.youtube.com/watch?v=EKC9jvY2q7s]
-
 TAL
TAL - 6 июн 2017 в 13:02
- 17 471
- 14
Puzan Mk10f
11 апр 2018 в 22:39, Сохранения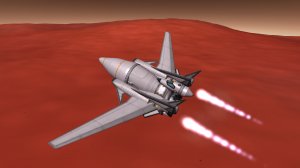
Альбатрос Mk1s
18 июн 2017 в 15:34, СохраненияHello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?
Kastronomicon, маяк Кербина
При всём уважении, в статье нет матана. Есть только элементарная математика.

ShineFix - мод для починки всех отражений и флагов в игре
В новой версии исправлено - теперь ресток тоже полностью поддерживается)
ShineFix - мод для починки всех отражений и флагов в игре
Shaddy и Shabby это два разных мода, ссылки в посте ведут на репозитории авторов, что априори самое
ShineFix - мод для починки всех отражений и флагов в игре
Я добавил в подпись актуальную версию, она будет обновляться автоматически, как и ссылка на неё)

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума

Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt