Пожалуй это самый долгий и большой мой проект в этой сфере. На его создание ушло 4 года. Правда 1 год он находился в долгом ящике, а последний год я занимался музыкальным сопровождением. И всё-таки я его победил. Прошу любить и жаловать.
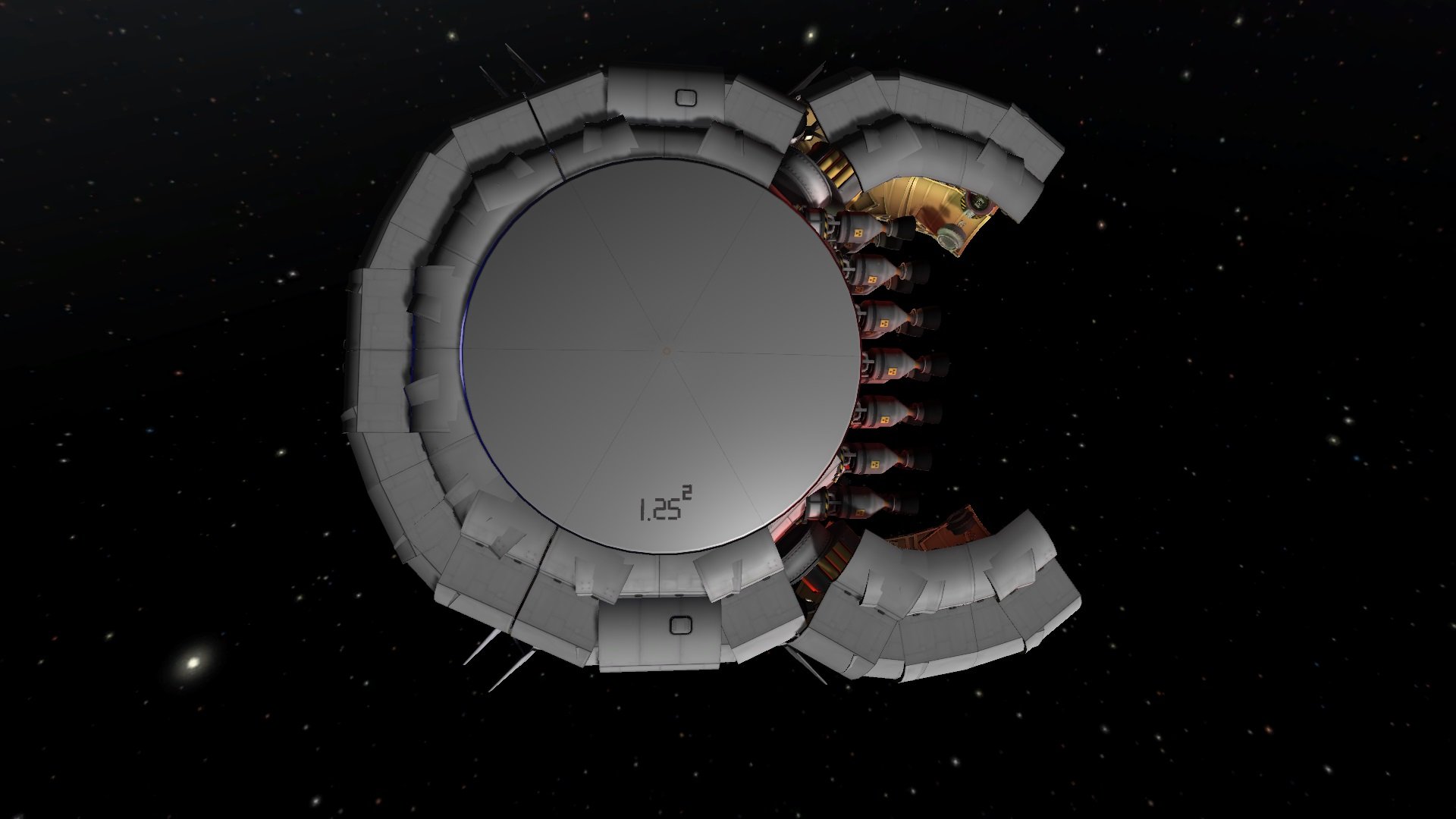
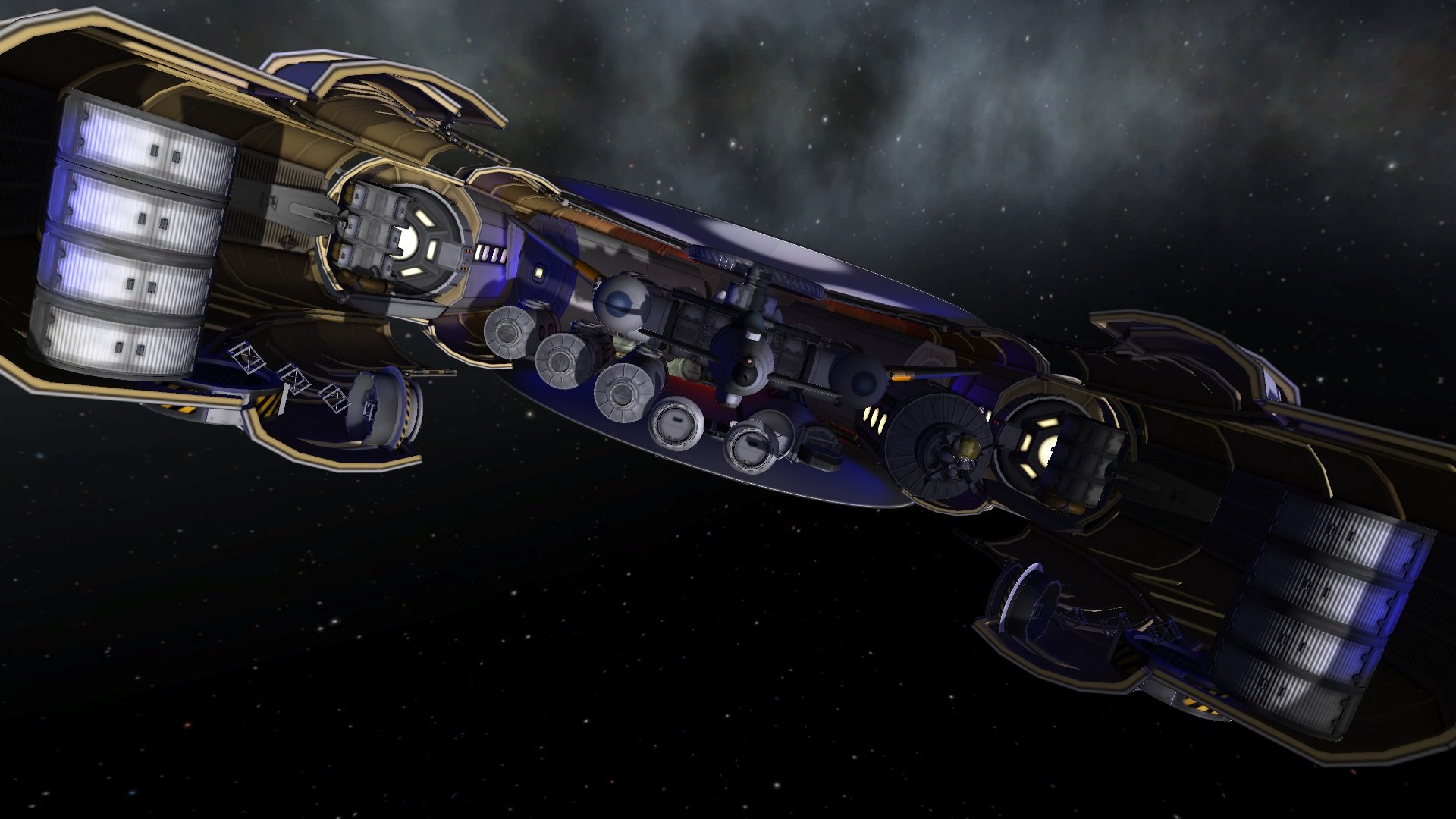
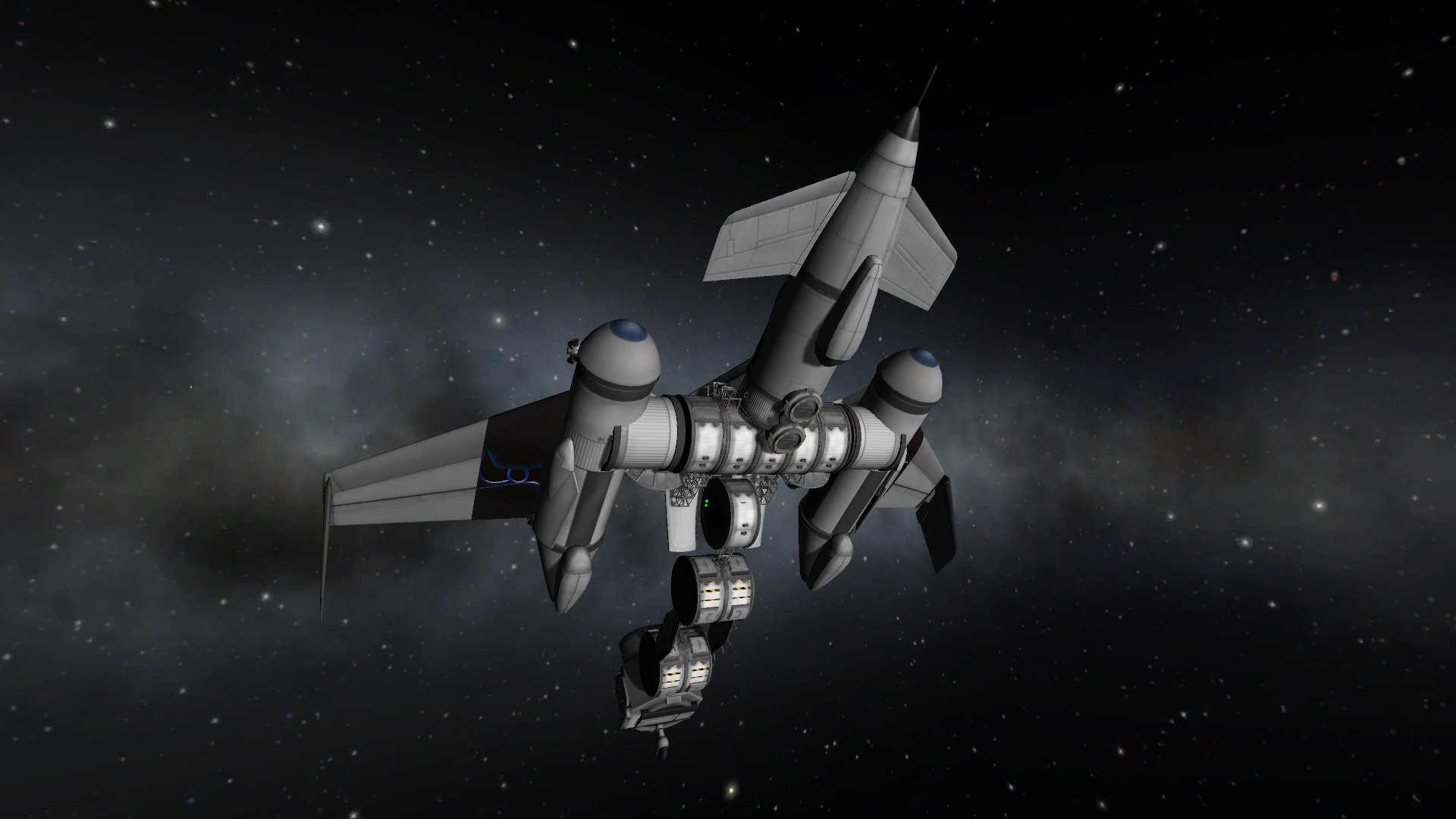
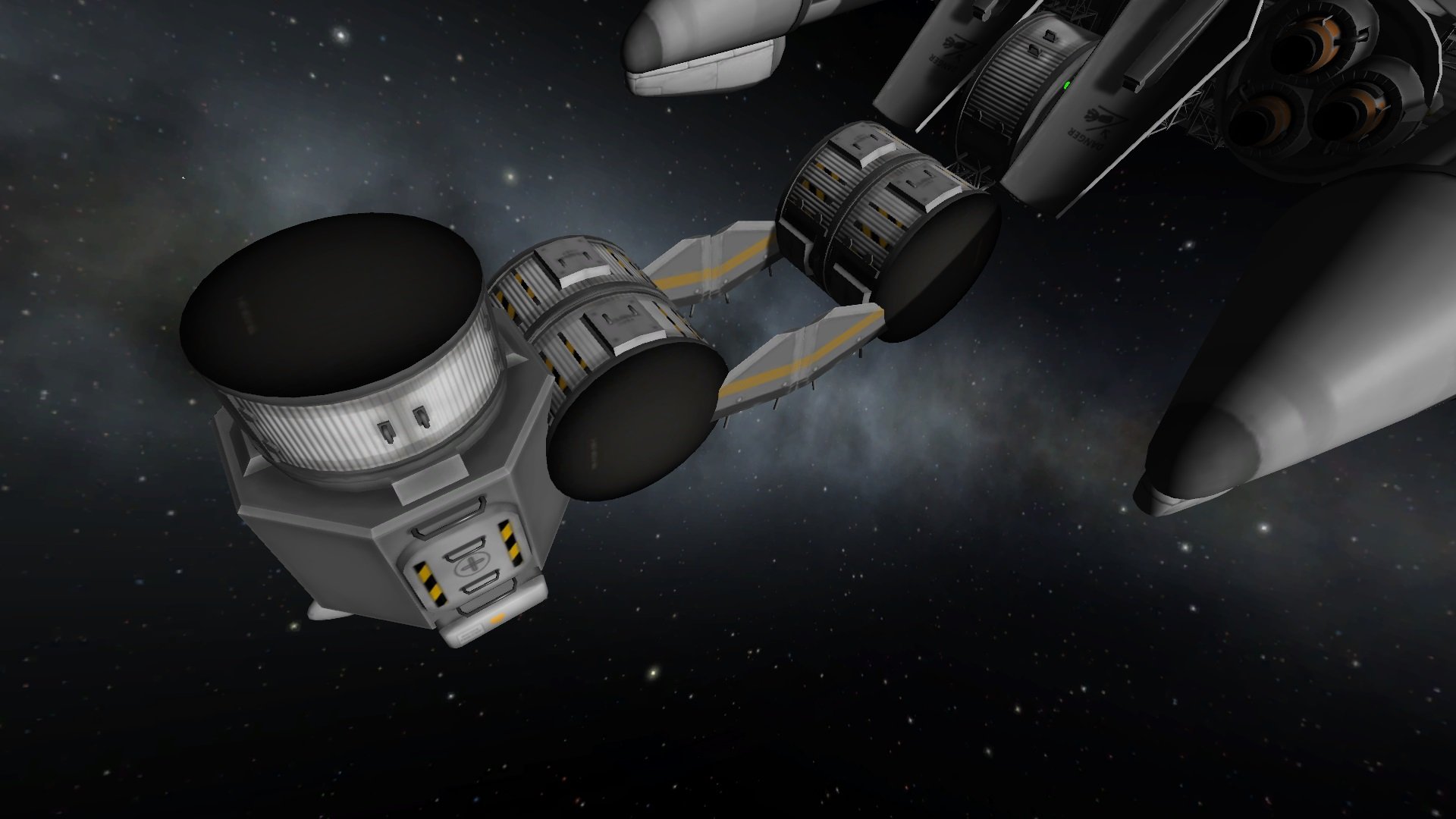
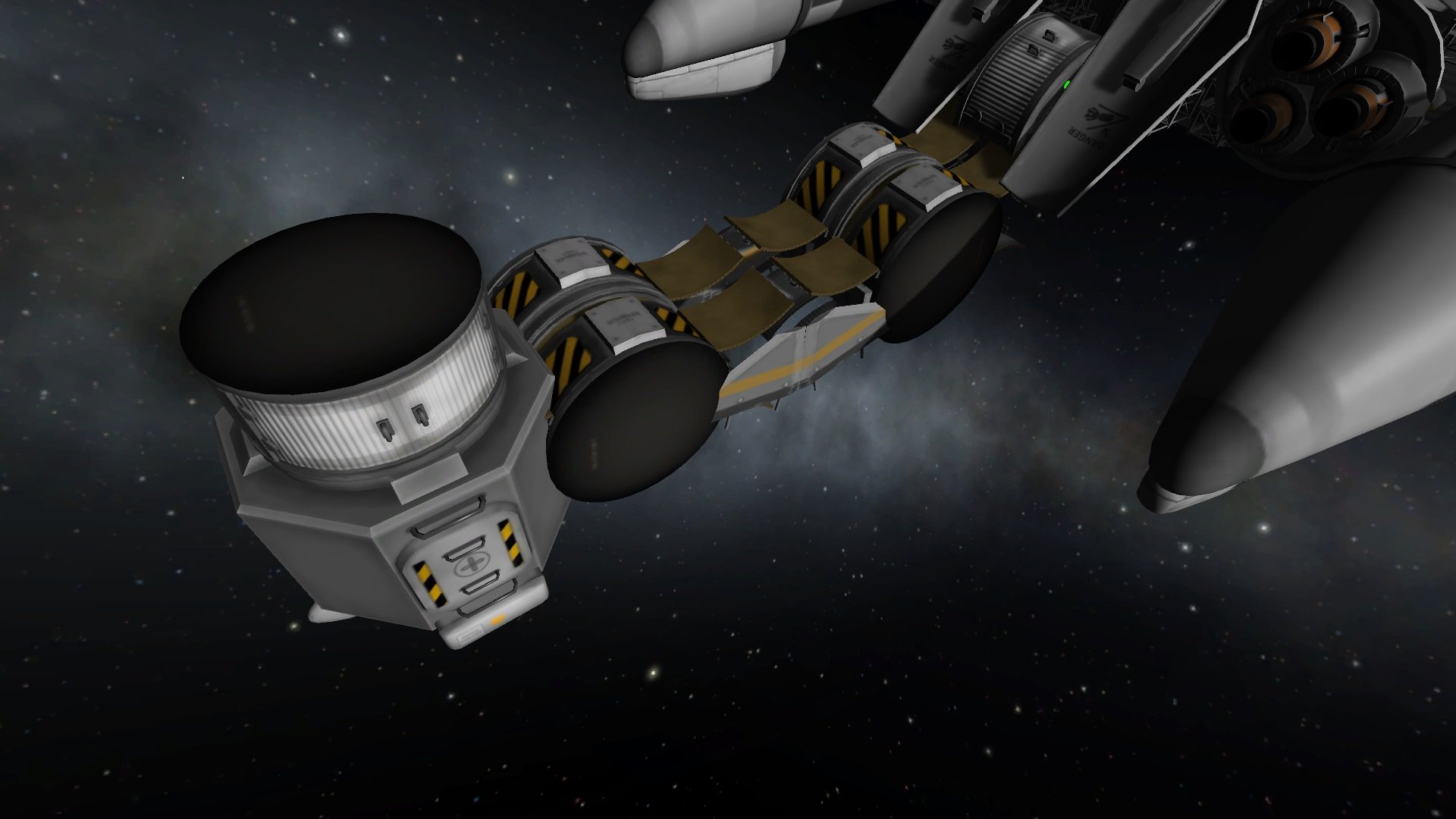
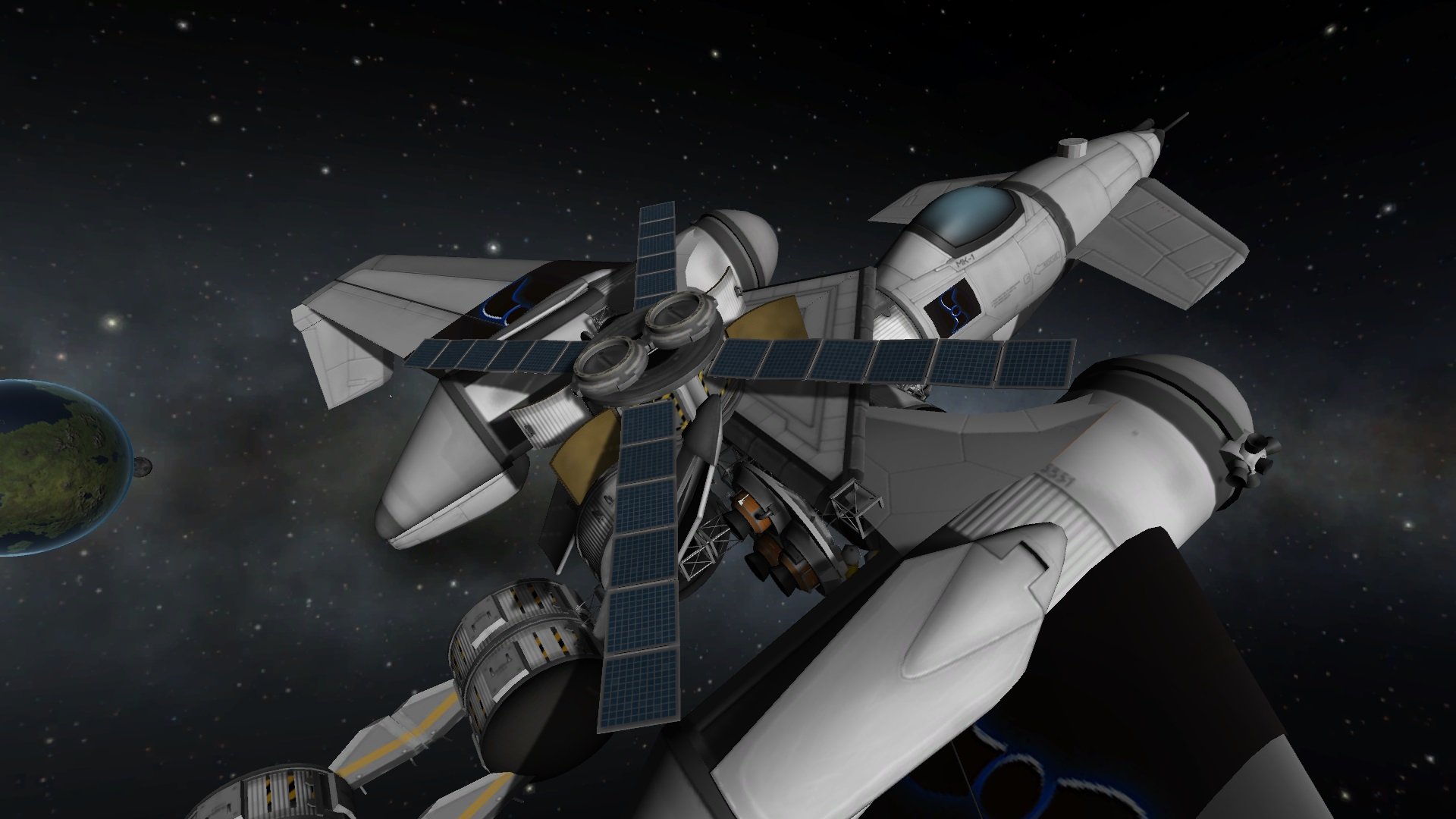
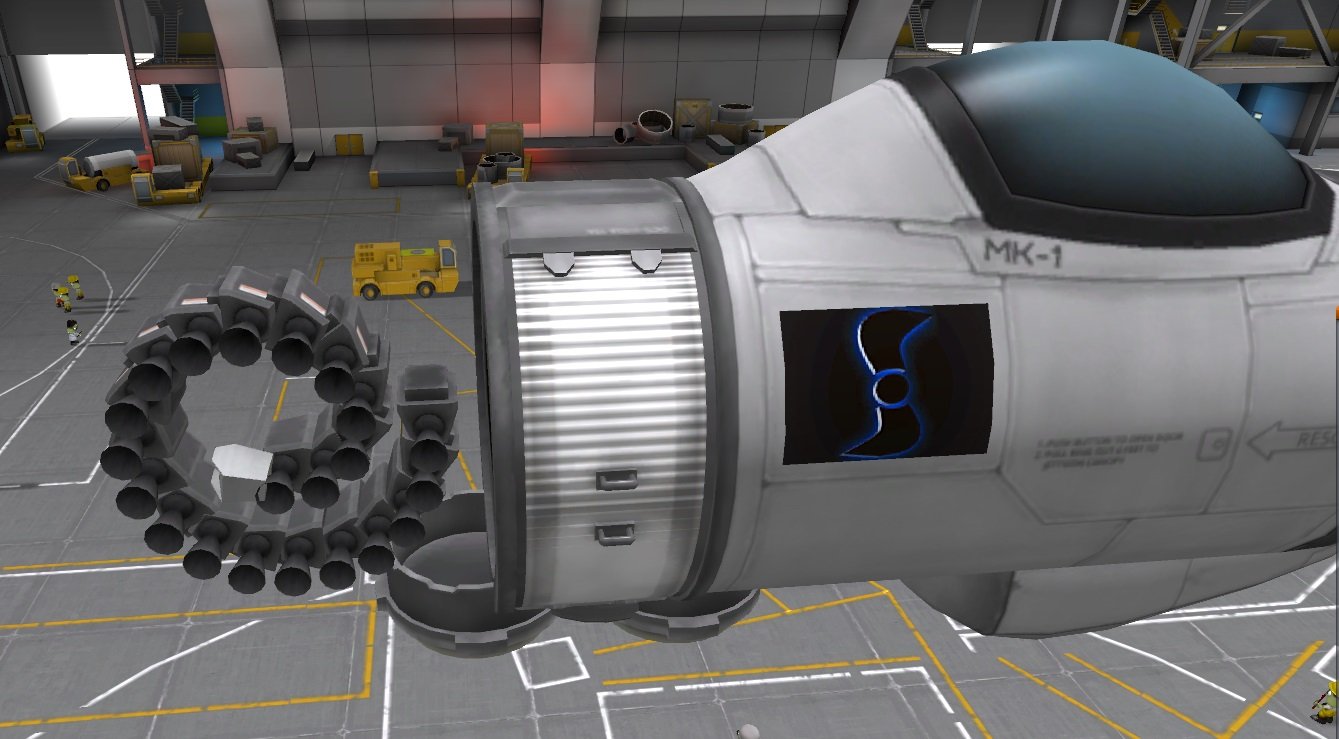
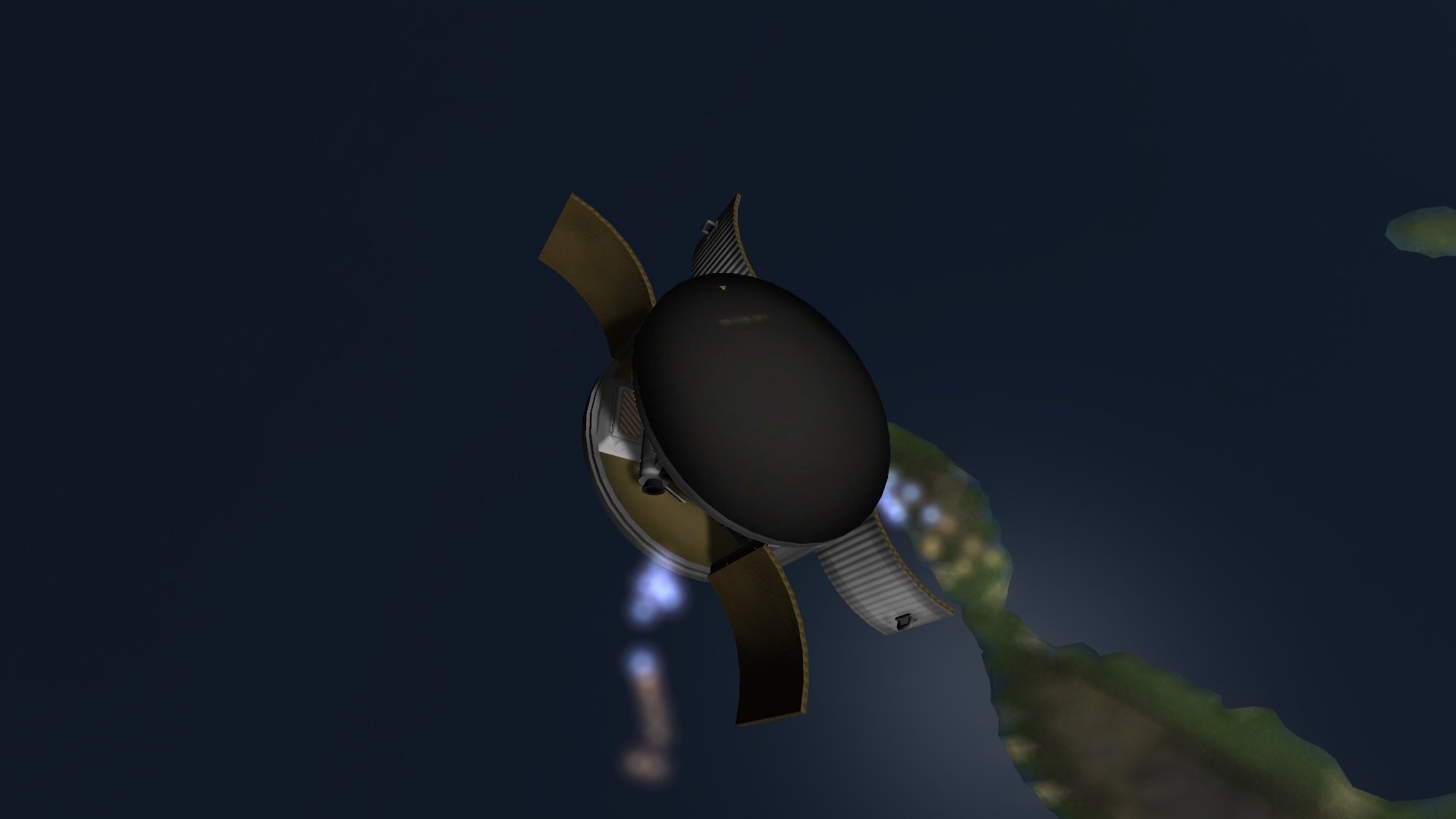
Квадро в Квадрате - Даже не спрашивайте откуда такое название. Вместимость 48 кербонавтов + 2е в шаттле + 2е в пассажирском контейнере + 1на бестолочь в клешне. Имеет 2 отсека, закрытые двухстворчатыми воротами. Чтобы открыть, нужно отпереть замки («7» фронт и «0» тыл) и активировать поворотный механизм «6». После открытия замков, створки держатся на 3х сегментных Bay петлях, изготовленных в более ранних версиях KSP.
Активировать ускорение и сохранение допустимо только при запертых створках, над чем придётся немного попотеть.
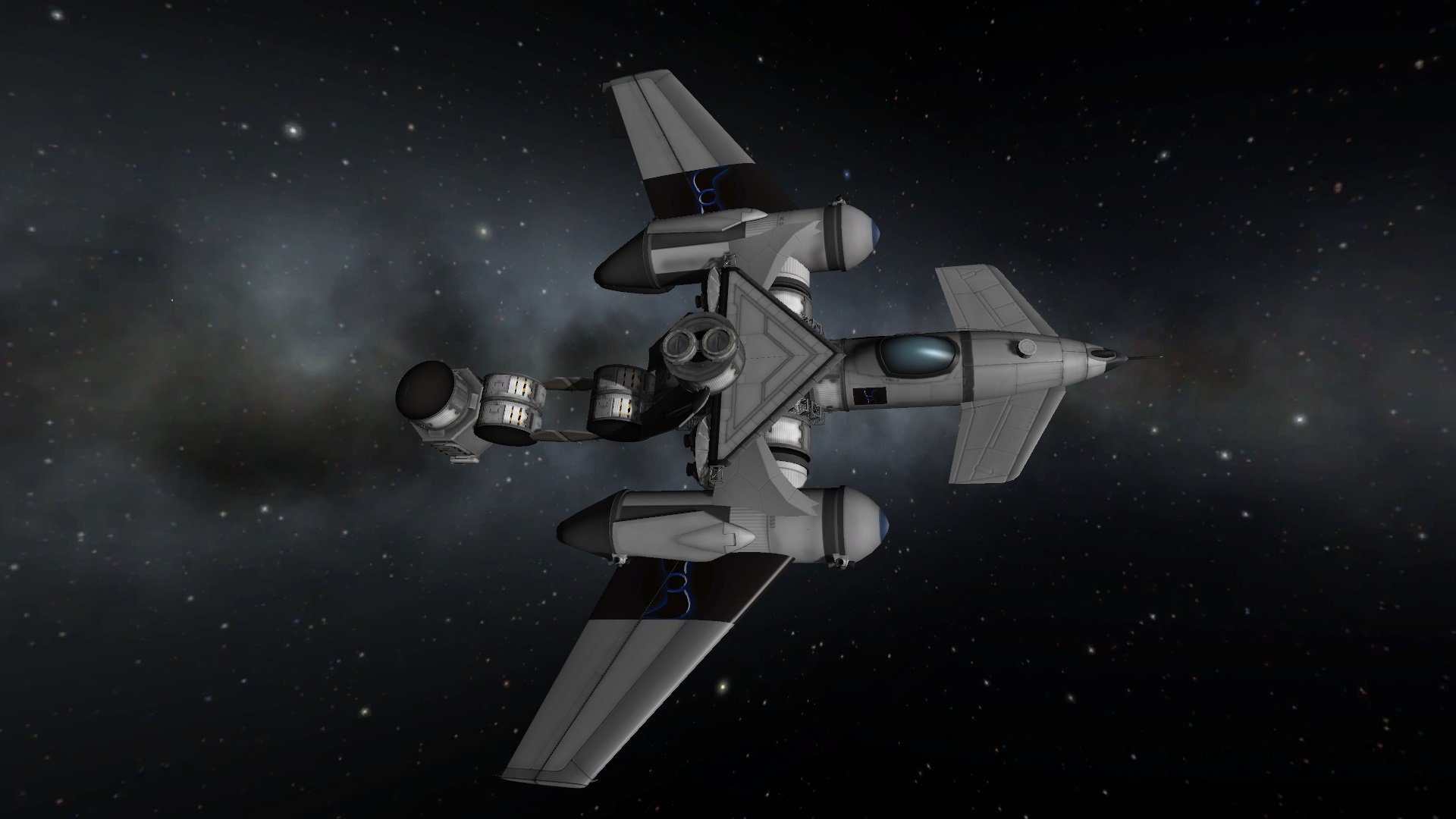
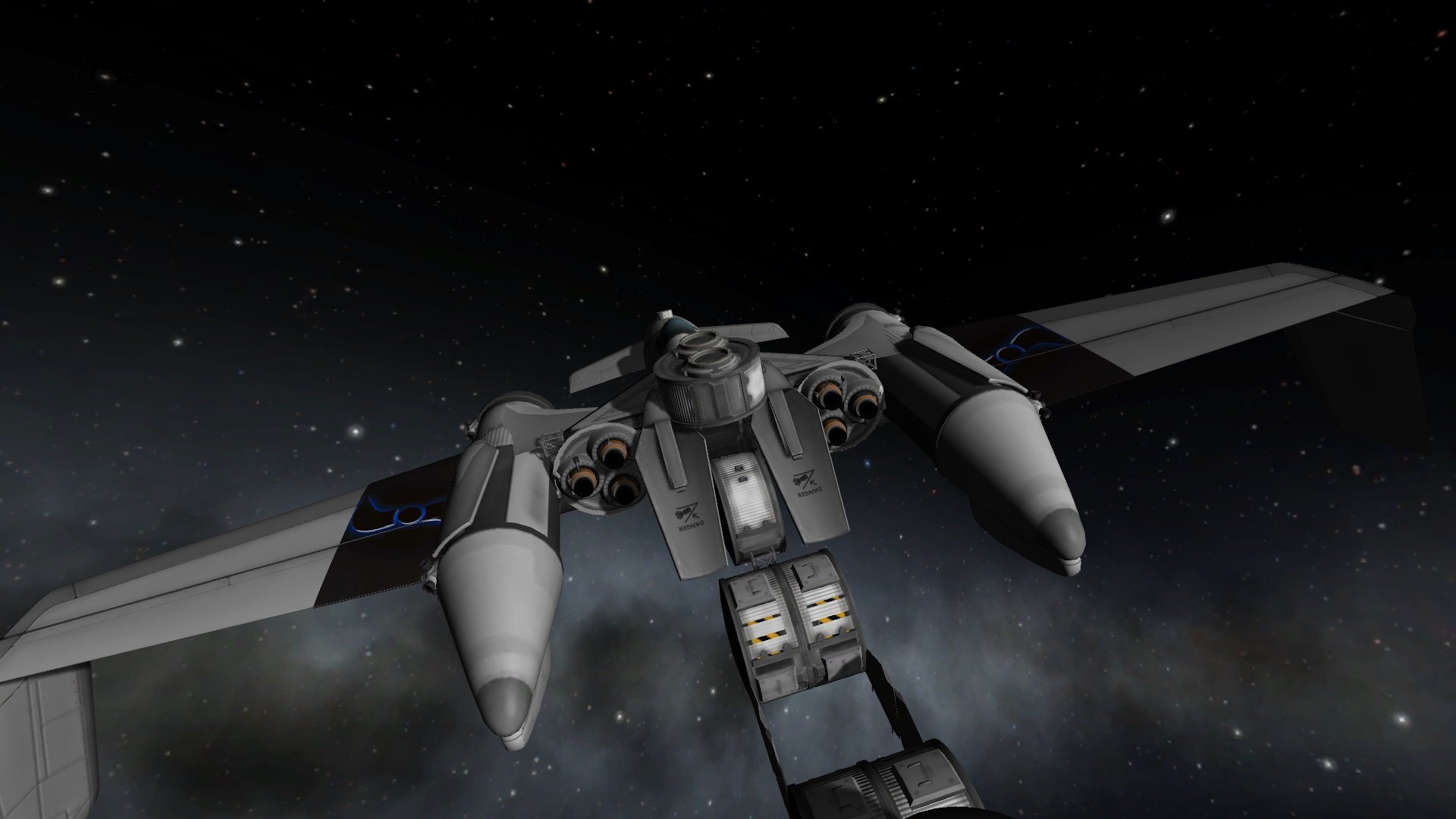
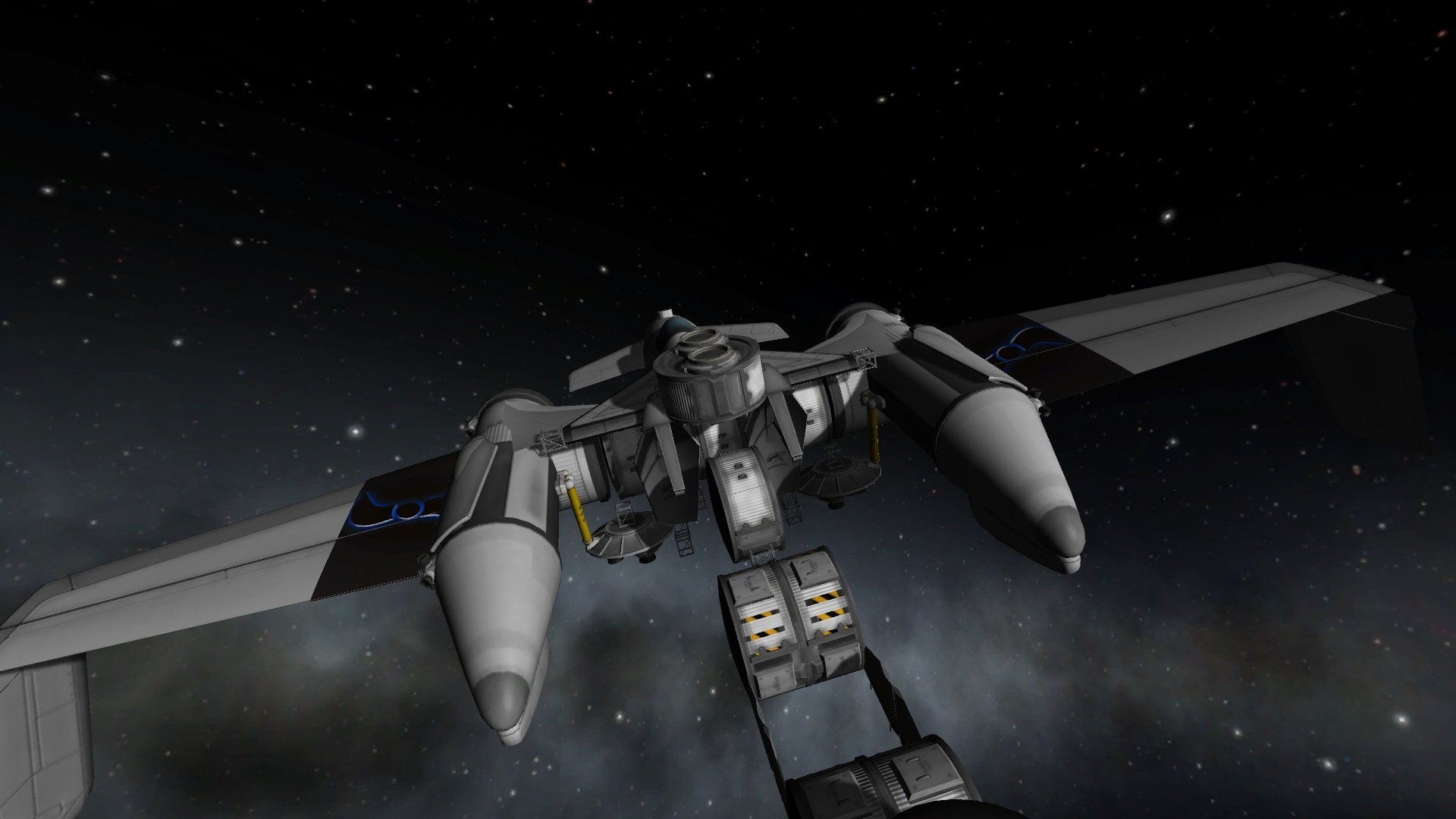
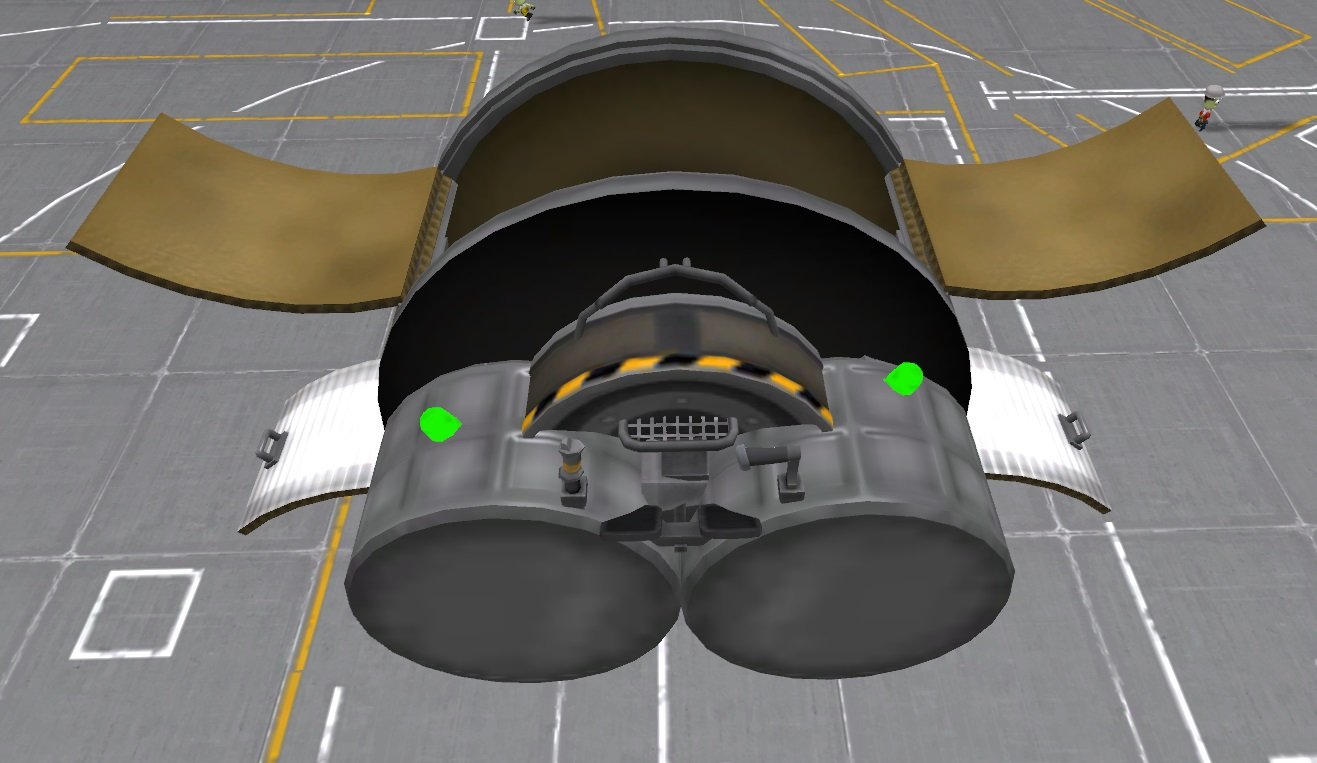
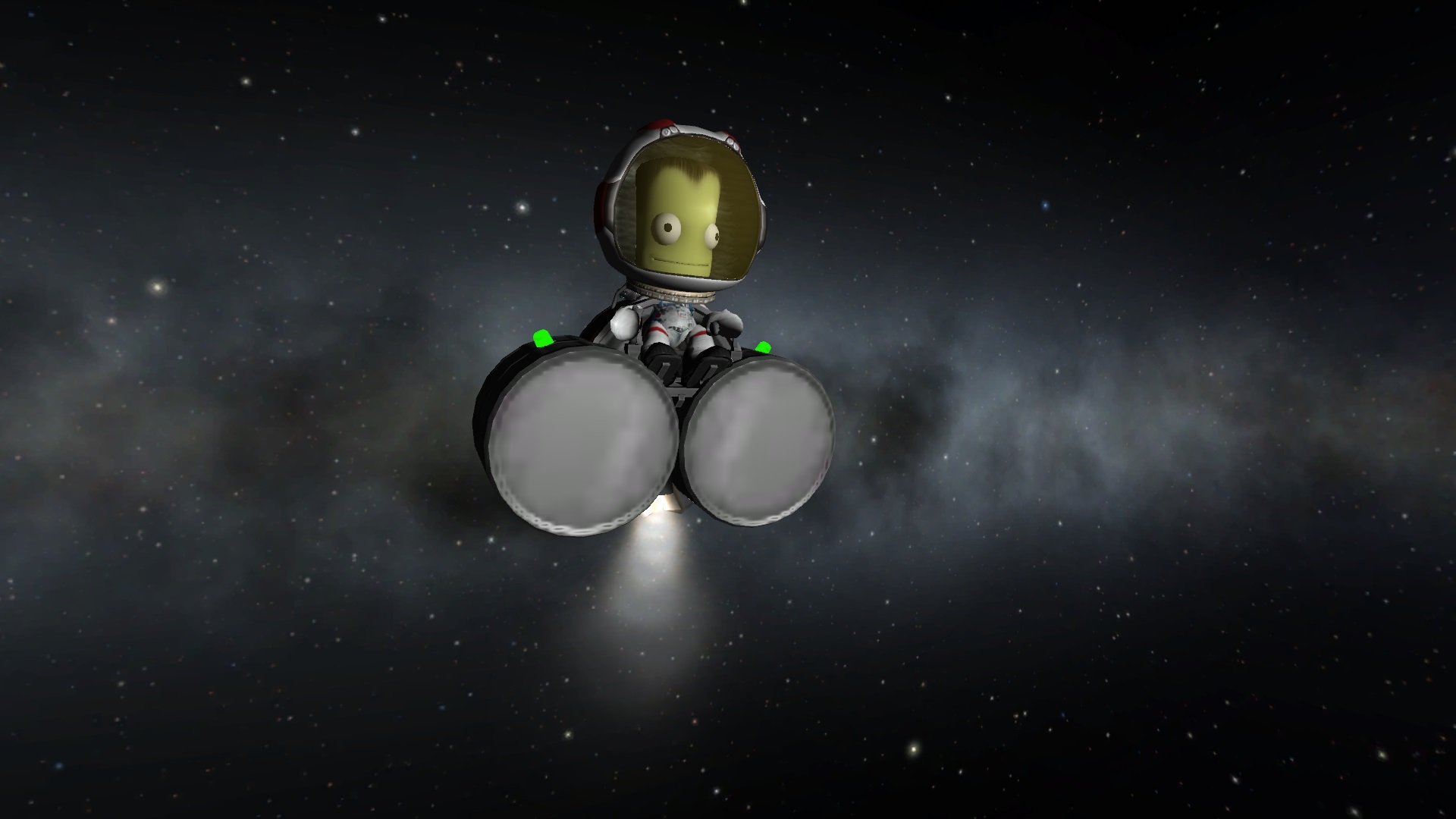
Квадро шаттл с функцией изменения вектора тяги. Принцип действия связан с разделением на 2 части, но при этом двигатели и корпус остаются единым целым, что позволяет полностью контролировать управление из кабины. Отделяются петли, которые удерживают двигатели в жёсткой оси. Двигатели соединены с корпусом через Bay пружину и без сторонних петель будут болтаться как кишка. Для смены вектора тяги нужно отделить петли и активировать воздушный тормоз, работающий в качестве поворотного механизма – клавиша «1». Деактивацией воздушного тормоза, возвращаем двигатели в исходное положение.
Активированная система нестабильна по отношению к ускорению и сохранению.
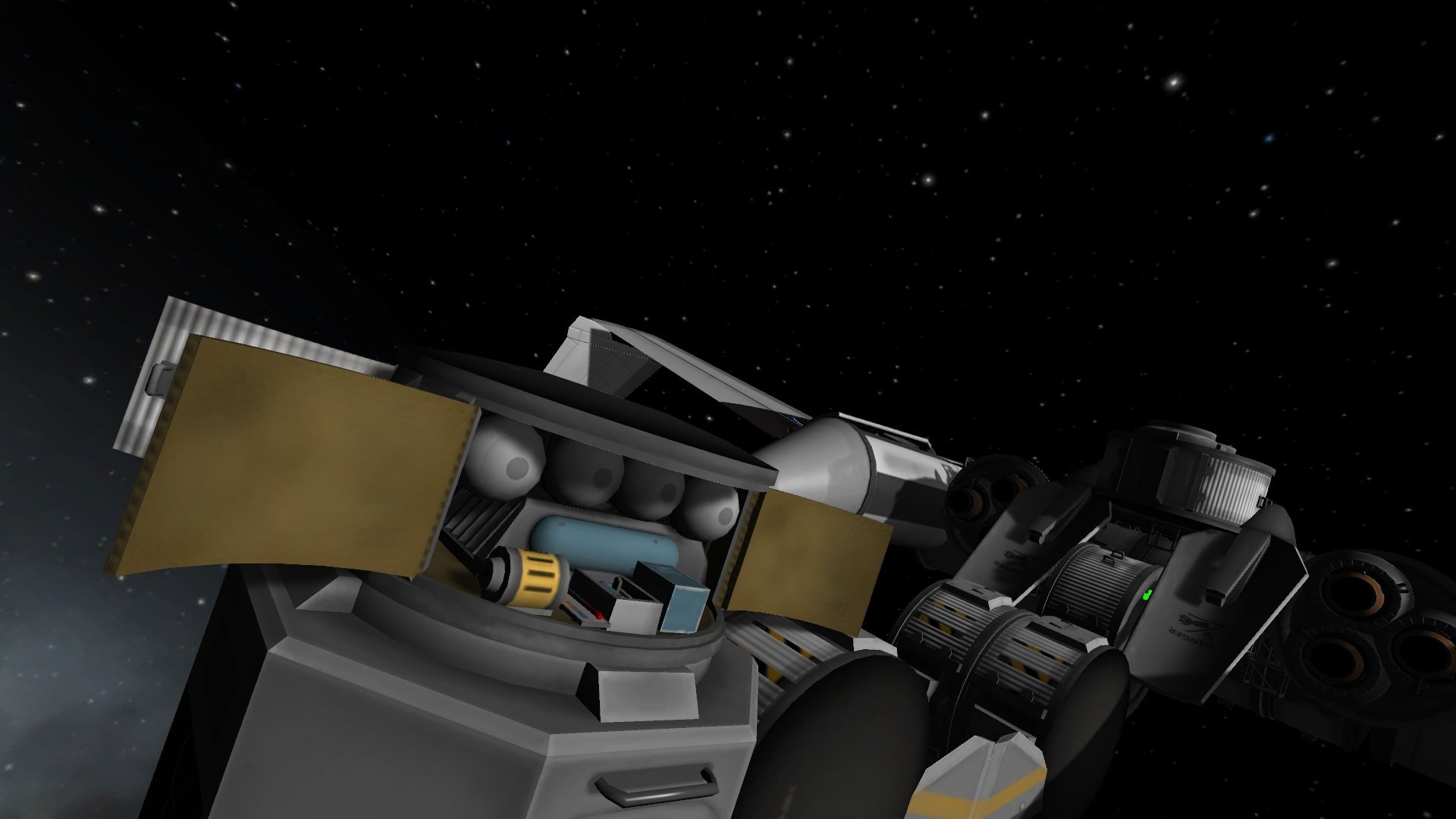
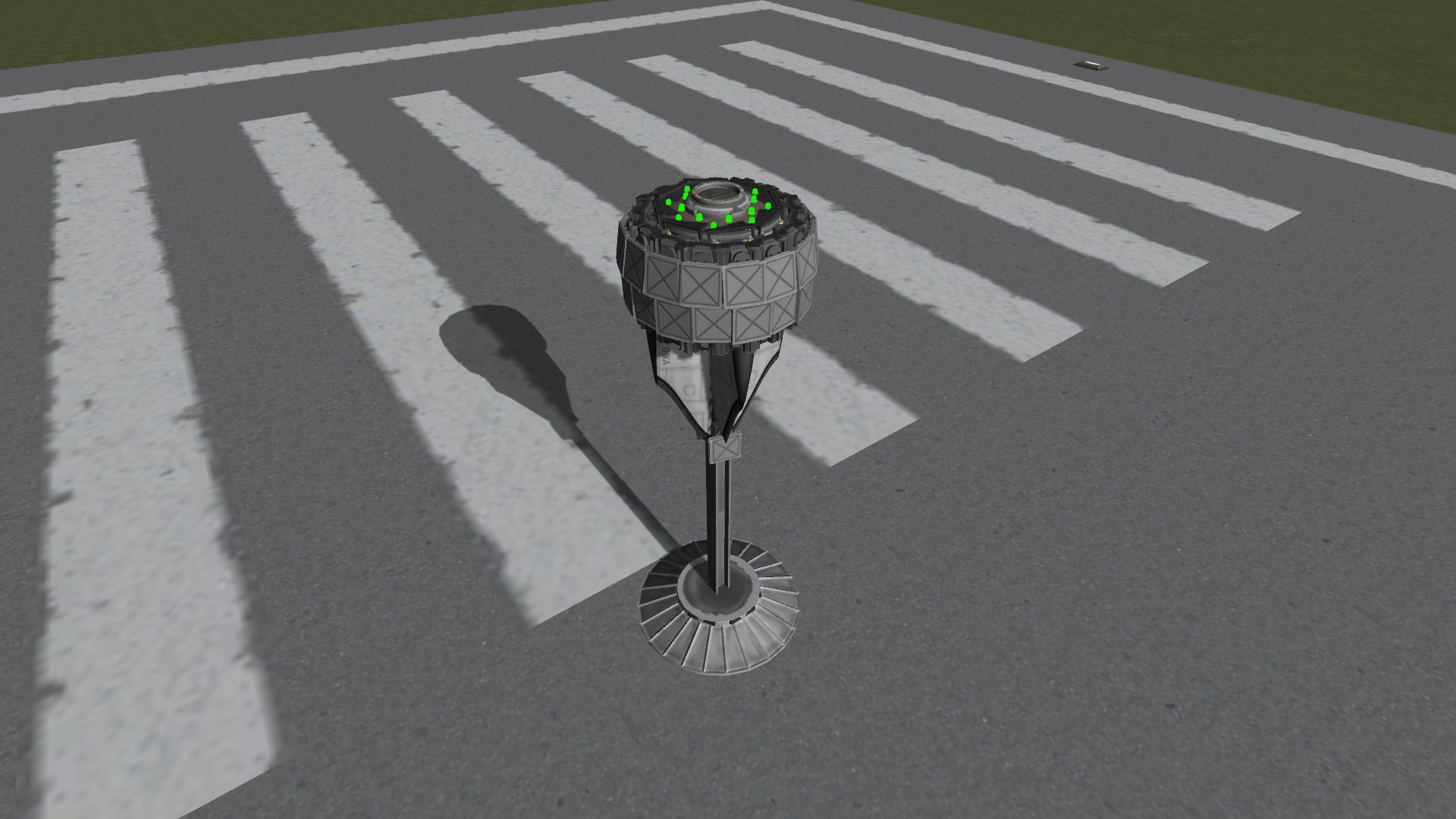
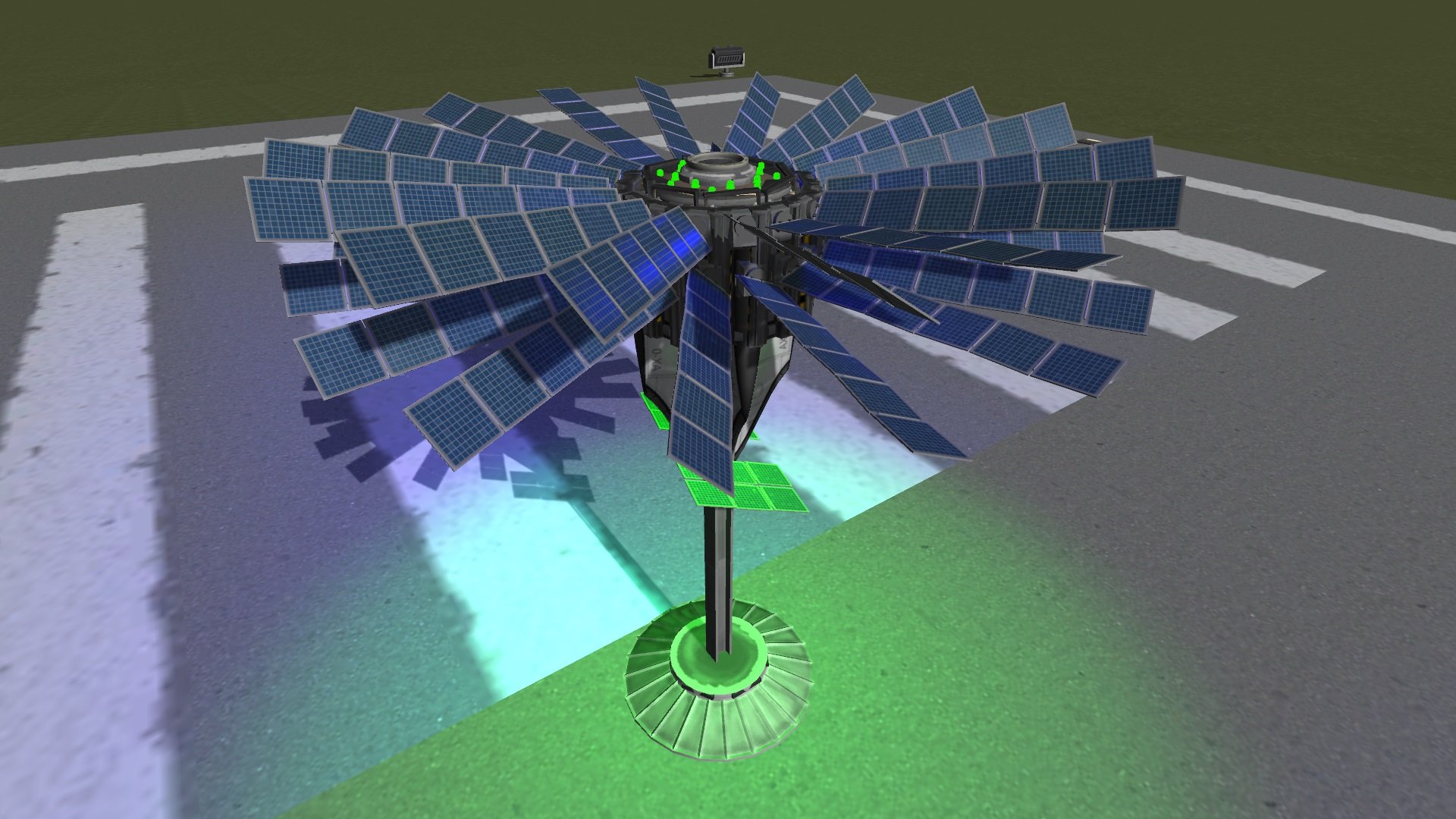
Нетто Брутто Масса 21.425 242.532 Кол-во дет. 194 567 1 - Управление вектором тяги 2 - Солнечные панели на куполе +купол 3 - Дрель с солнечными со своими панелями 4 - Антенна Bay нагибатора, Фонари Bay робота, Панель Bay кара, Панели Bay спутника 5 - Отстегнуть и выкинуть Bay нагибатора 6 - Поворотные механизмы створок 7 - Отпереть фронтальные створки 8,9 - Передние, задние створки Квадро; Солнечные панели и тарелка Bay Спутника 0 - Отпереть тыльные створки, Тормоза шасси.
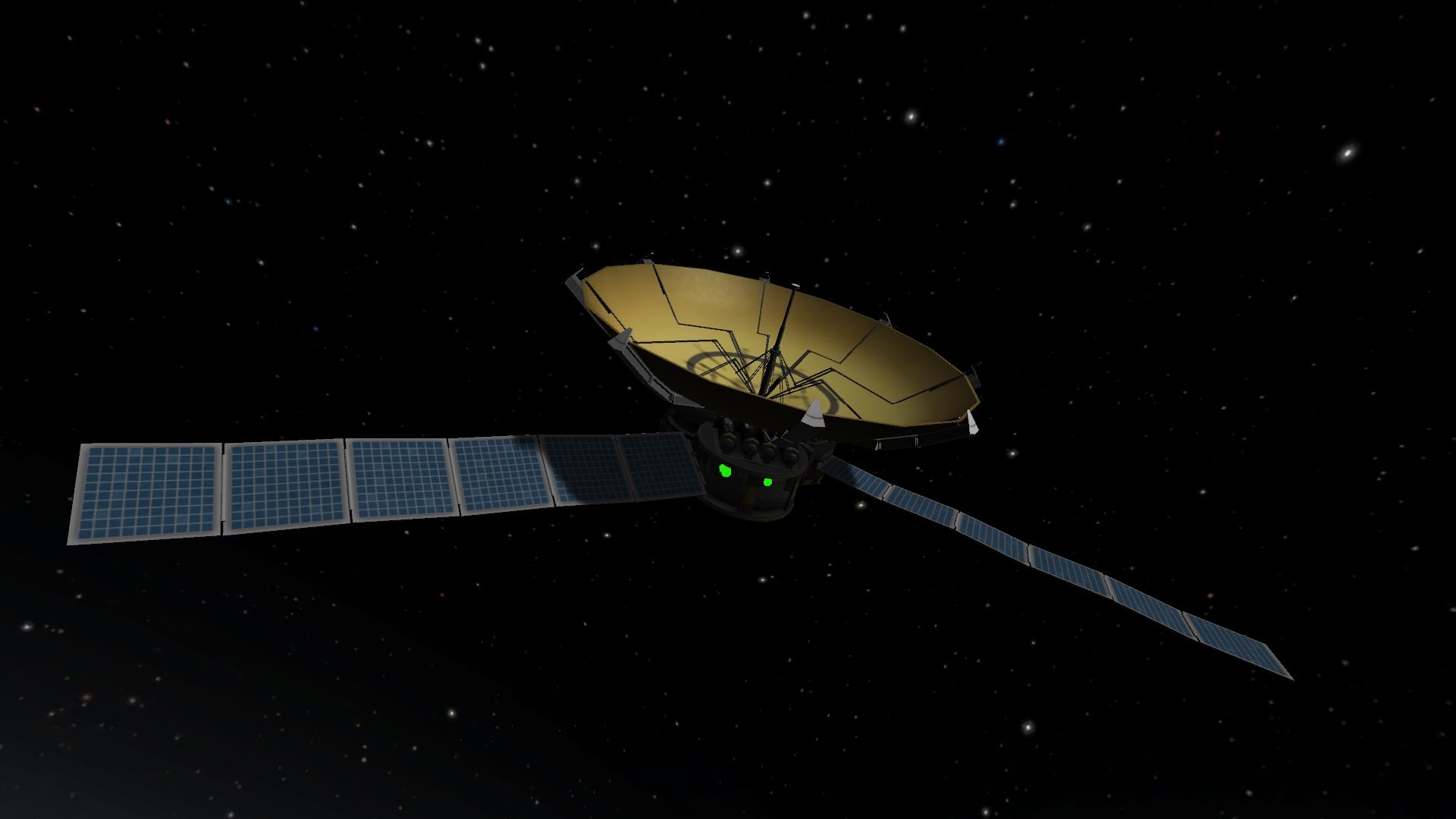
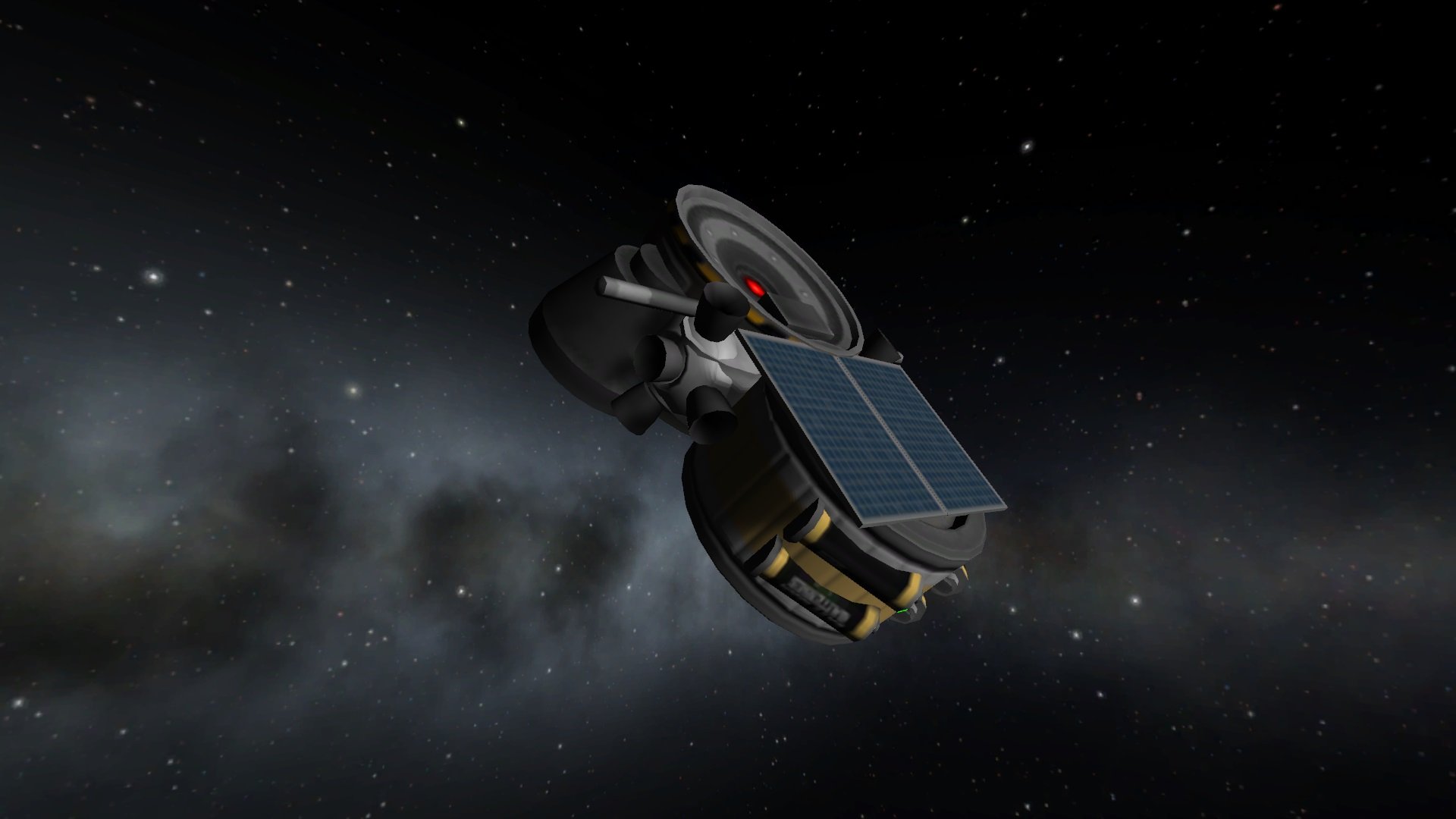
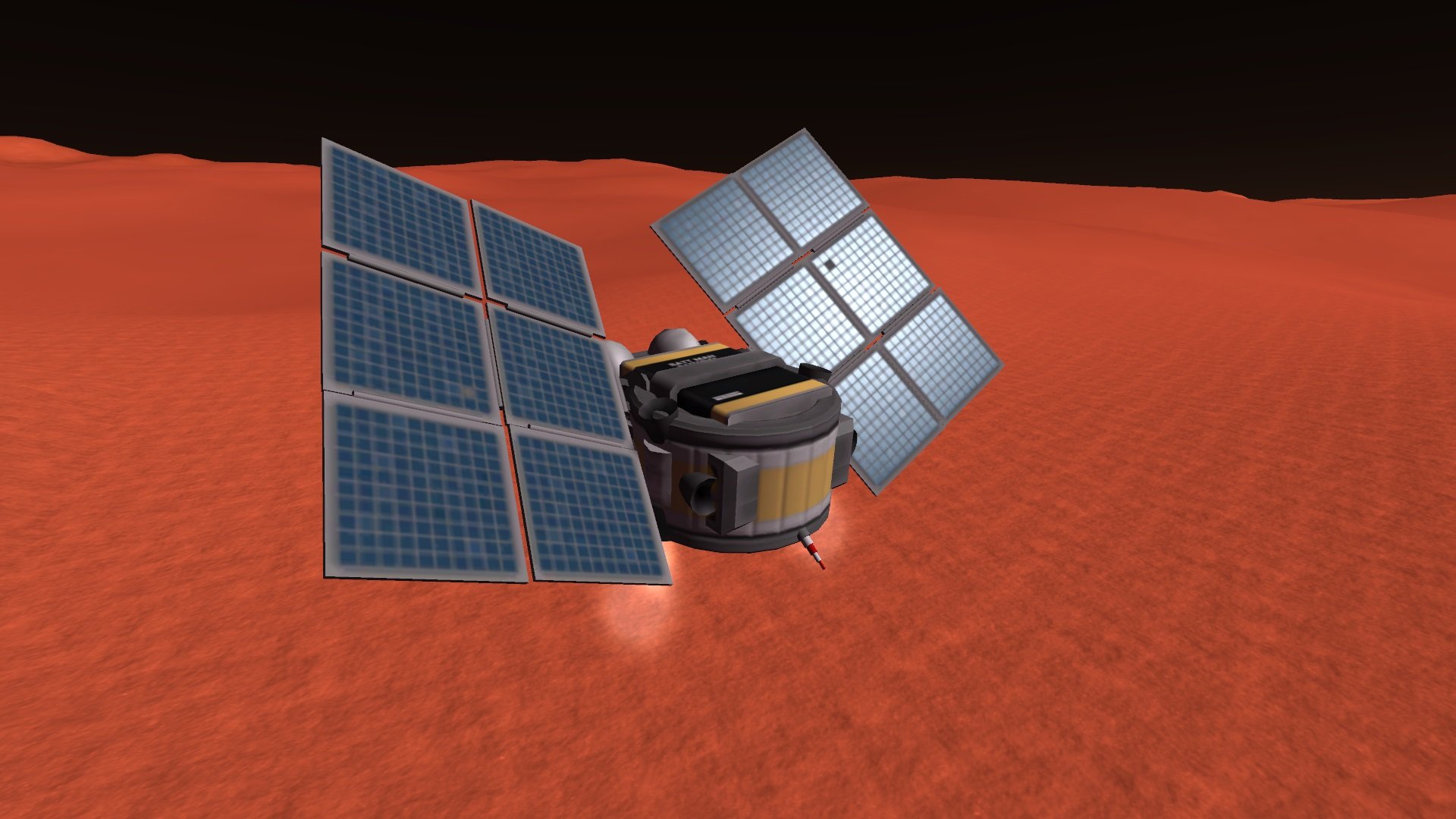
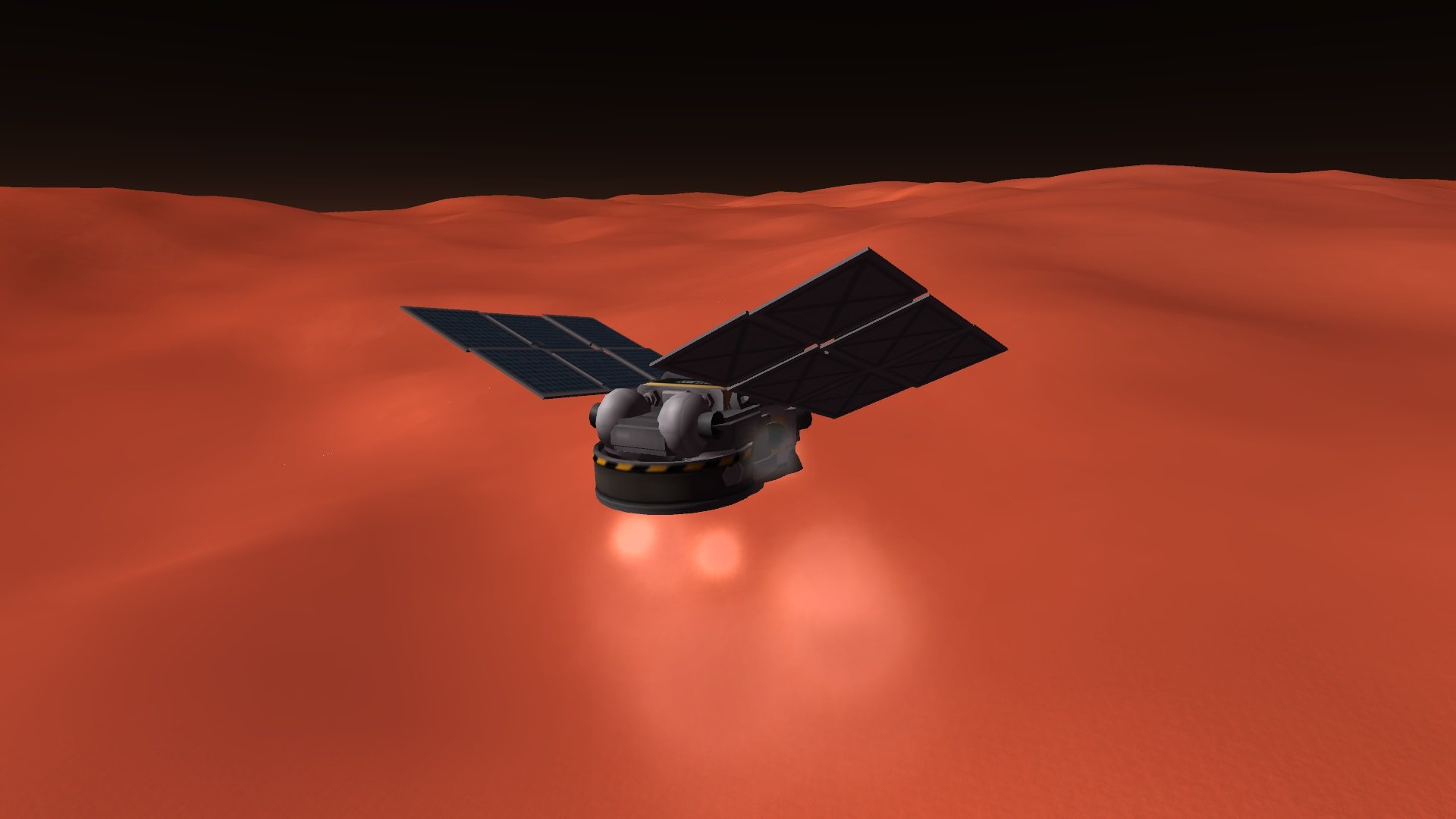
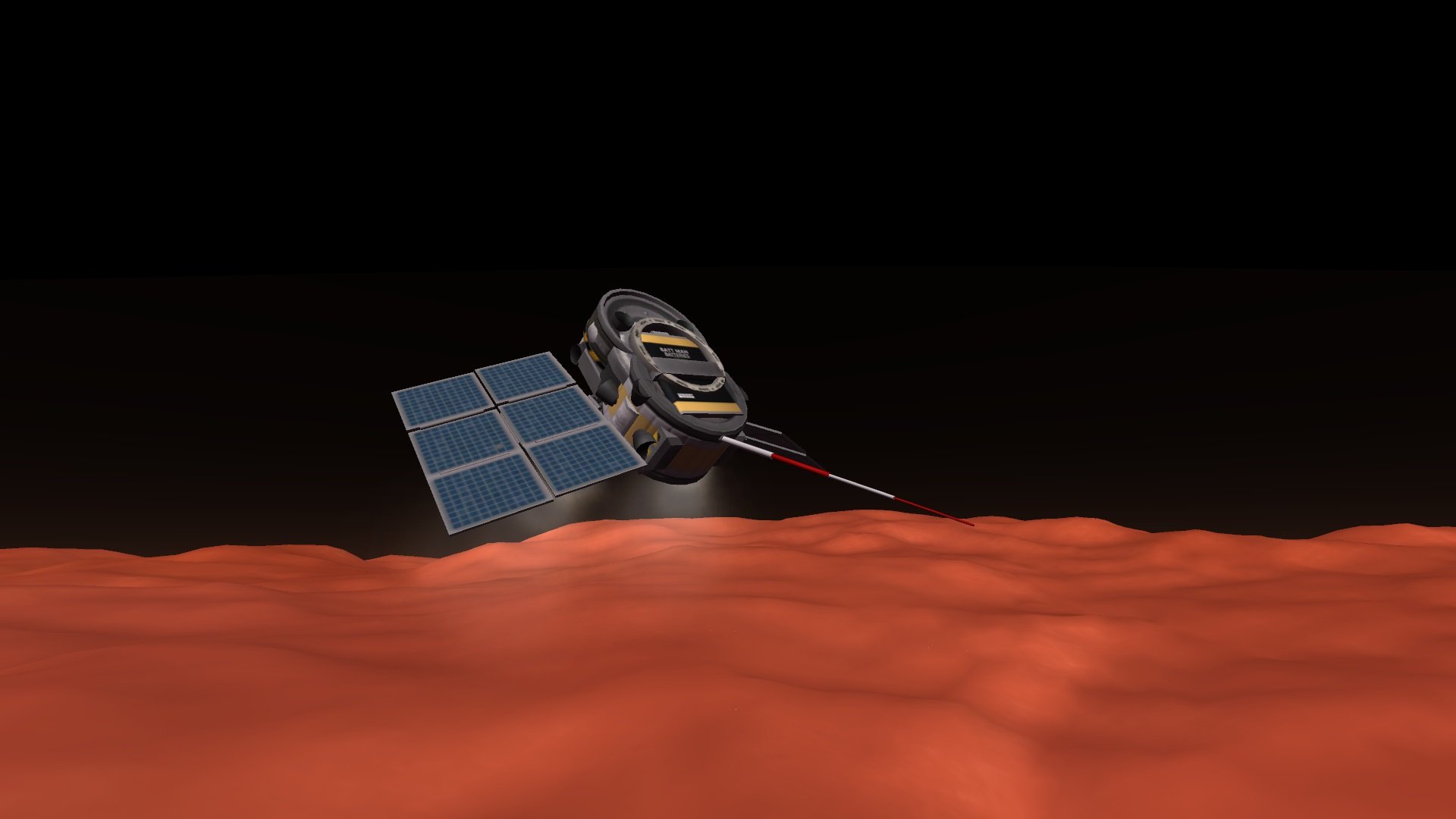
Bay Спутник - Малый ретранслятор. Можно использовать как зонд.
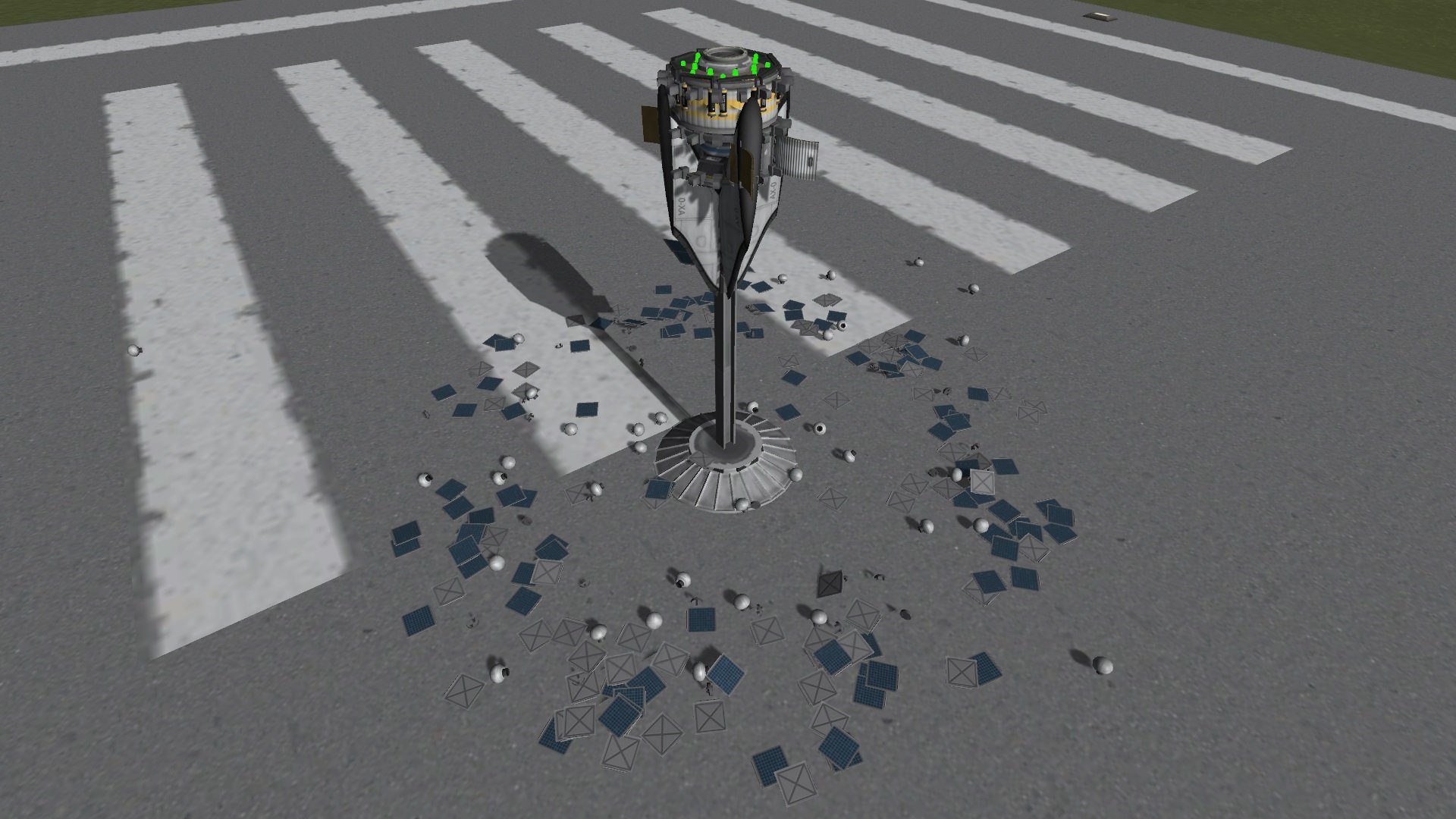
Я ему случайно башку свернул, поэтому управление повёрнуто на 90*, ну да ладно, всё равно пользоваться этой моделью никто не будет – это чисто для ознакомления. Ну а если всё-таки… Для выхода из упаковки, отсоедините декуплер, активируйте SAS модуль и мелкими рывками поворота крена, выводим спутник наружу.
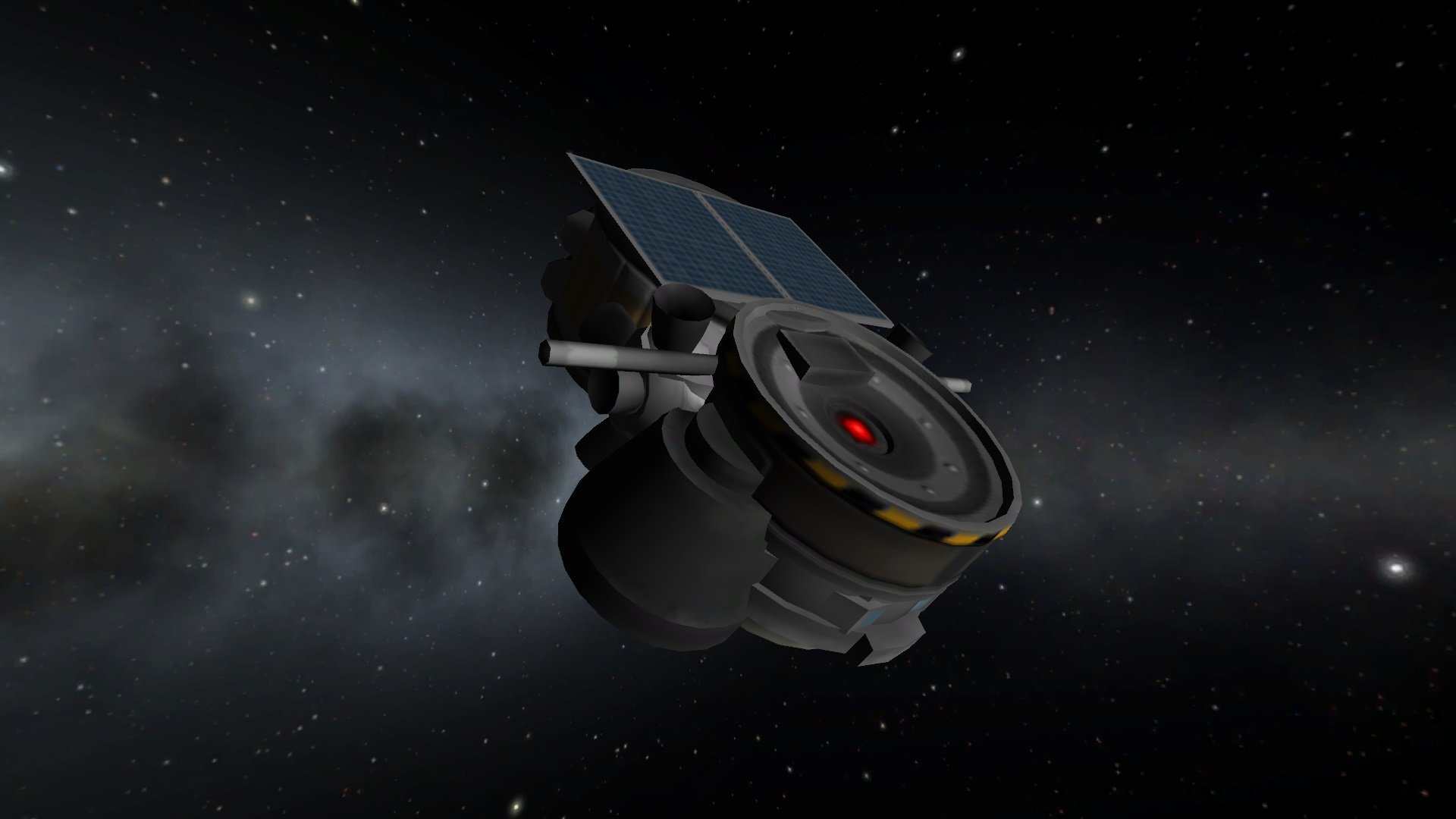
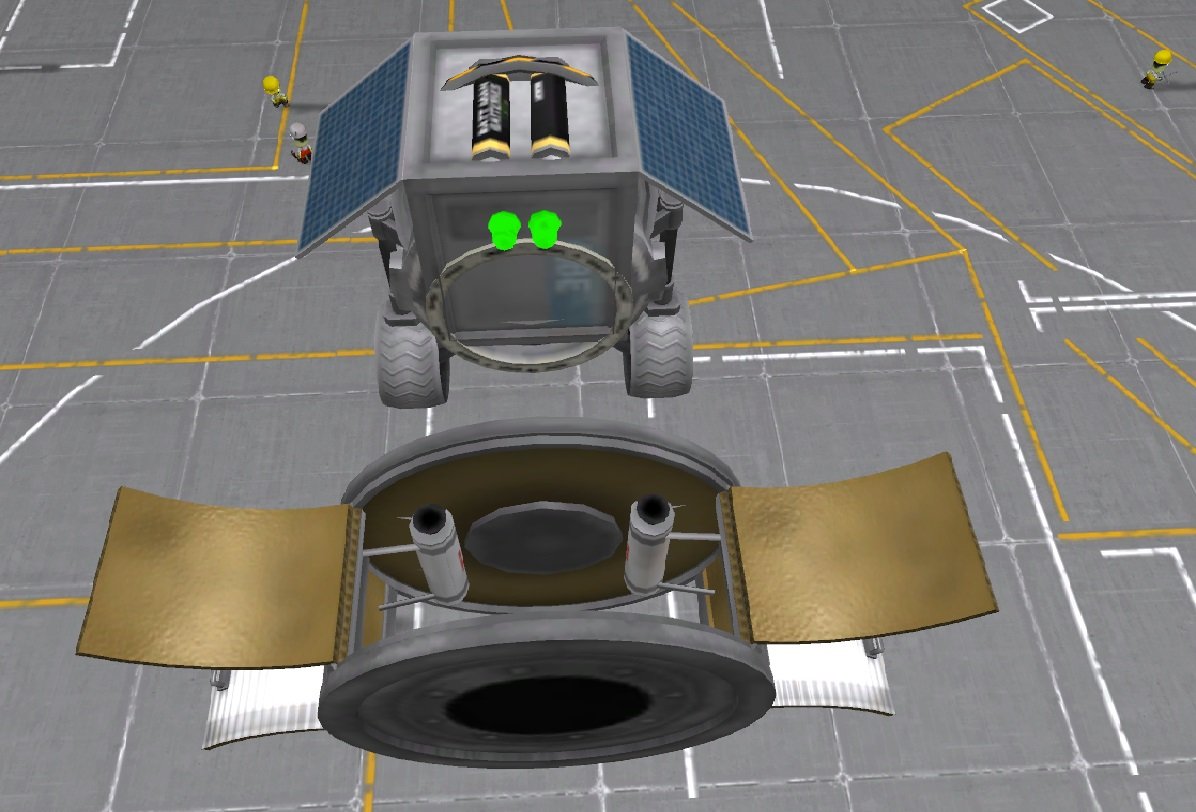
Bay Робот - Весьма полезный помощник, для манипуляций на орбите или планет с малой гравитацией. Правда, если предмет манипуляции оснащён малым док портом. Имеет всесторонне направленные двигатели (RCS) и малый SAS модуль, что позволяет этой малютке оперировать с достаточно тяжёлыми грузами (хотя в условиях невесомости всё это… Не пчёлы). Оснащён двумя прожекторами зелёного и красного свечения для удобства ориентирования при взгляде со стороны. Главной особенностью является способность возвращаться в свой служебный отсек для многоразового использования.
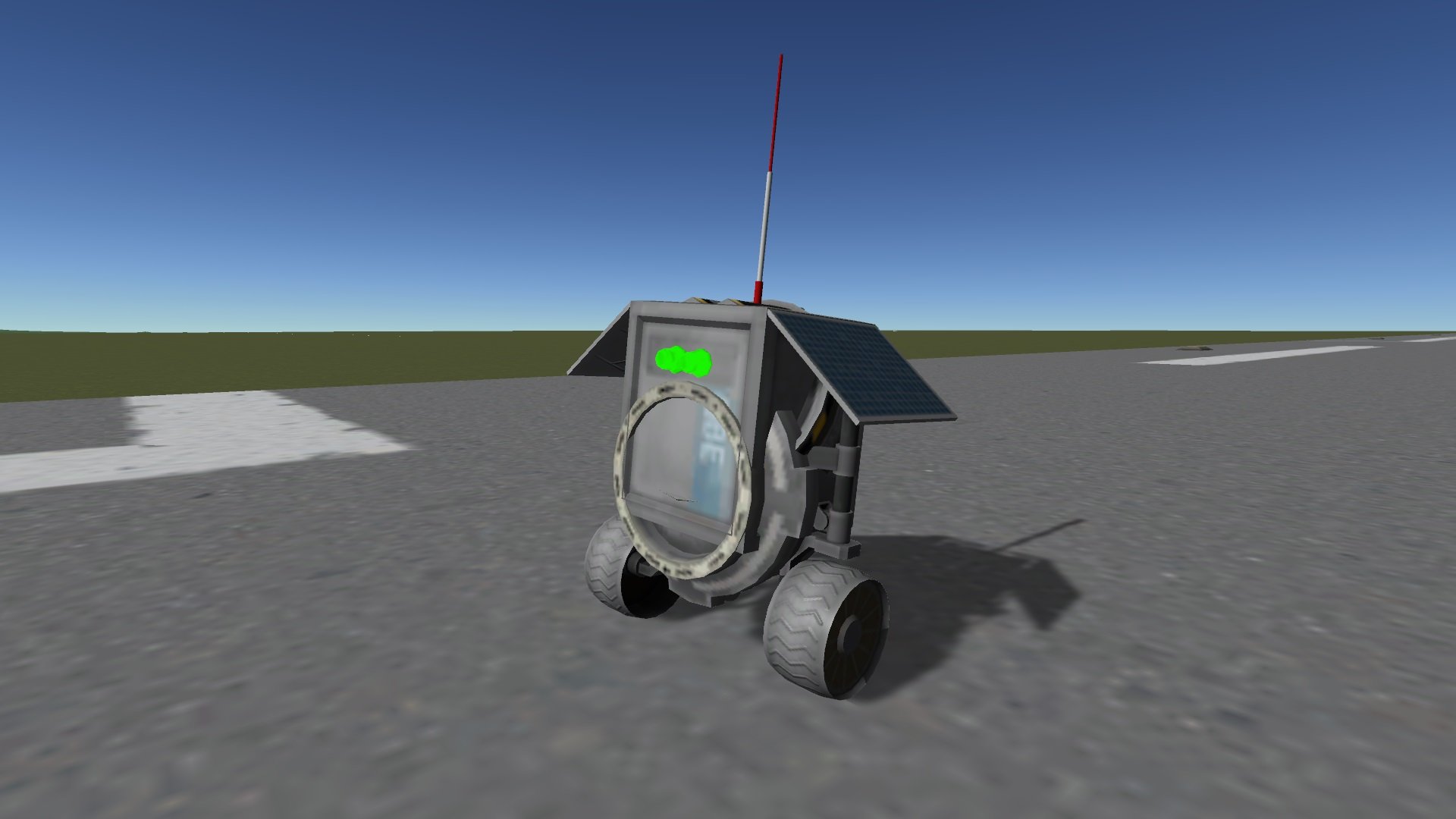
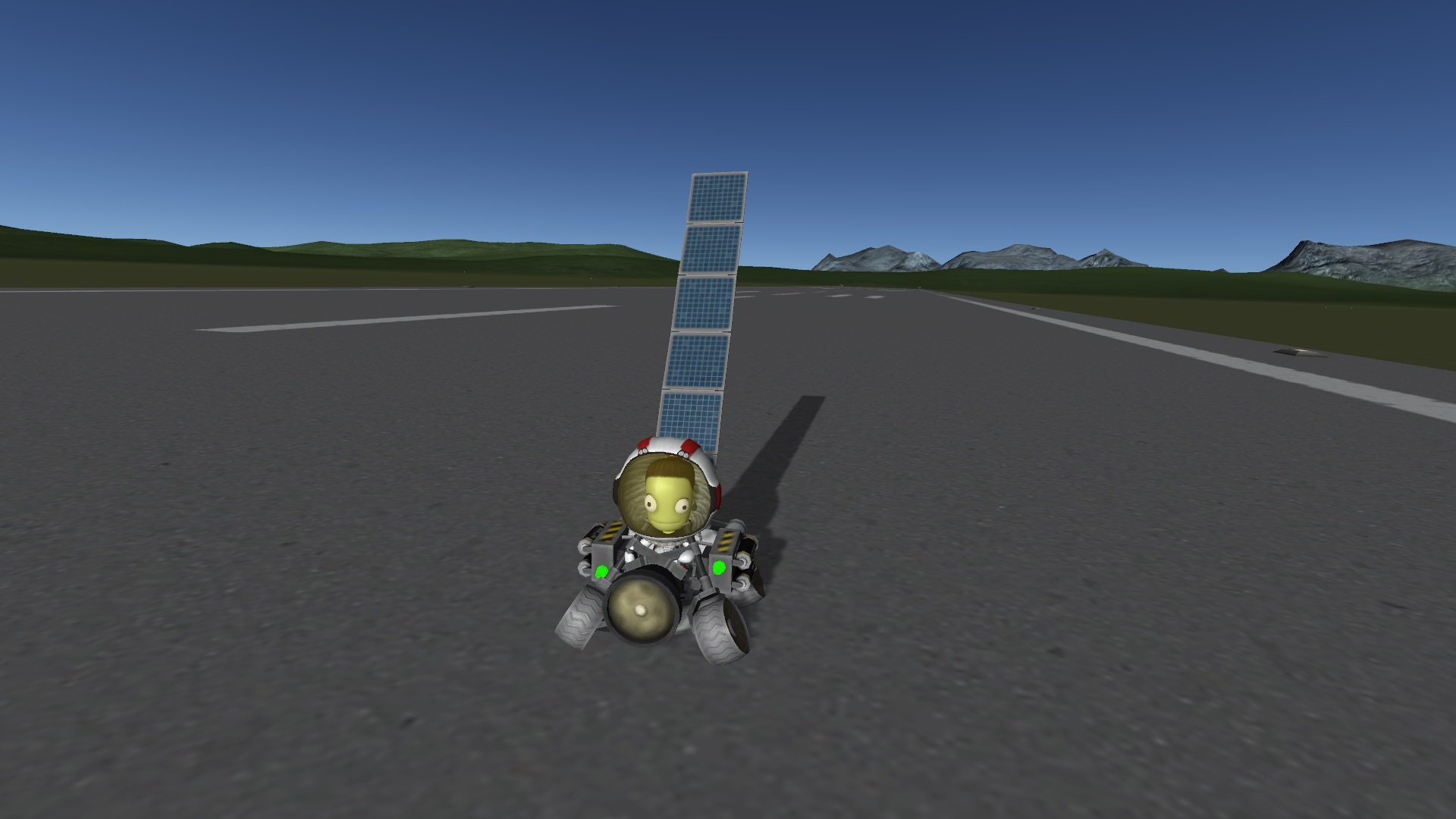
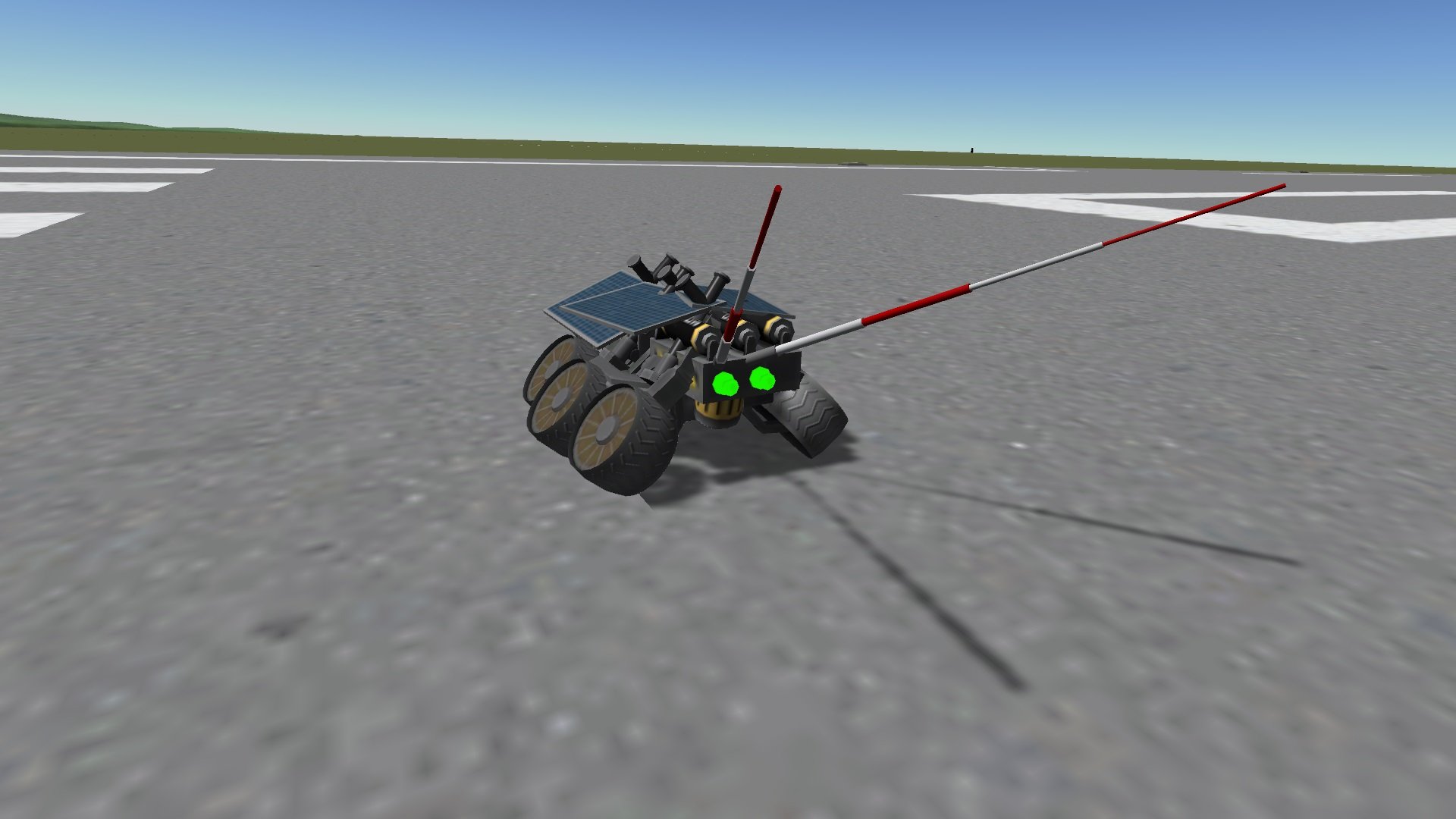
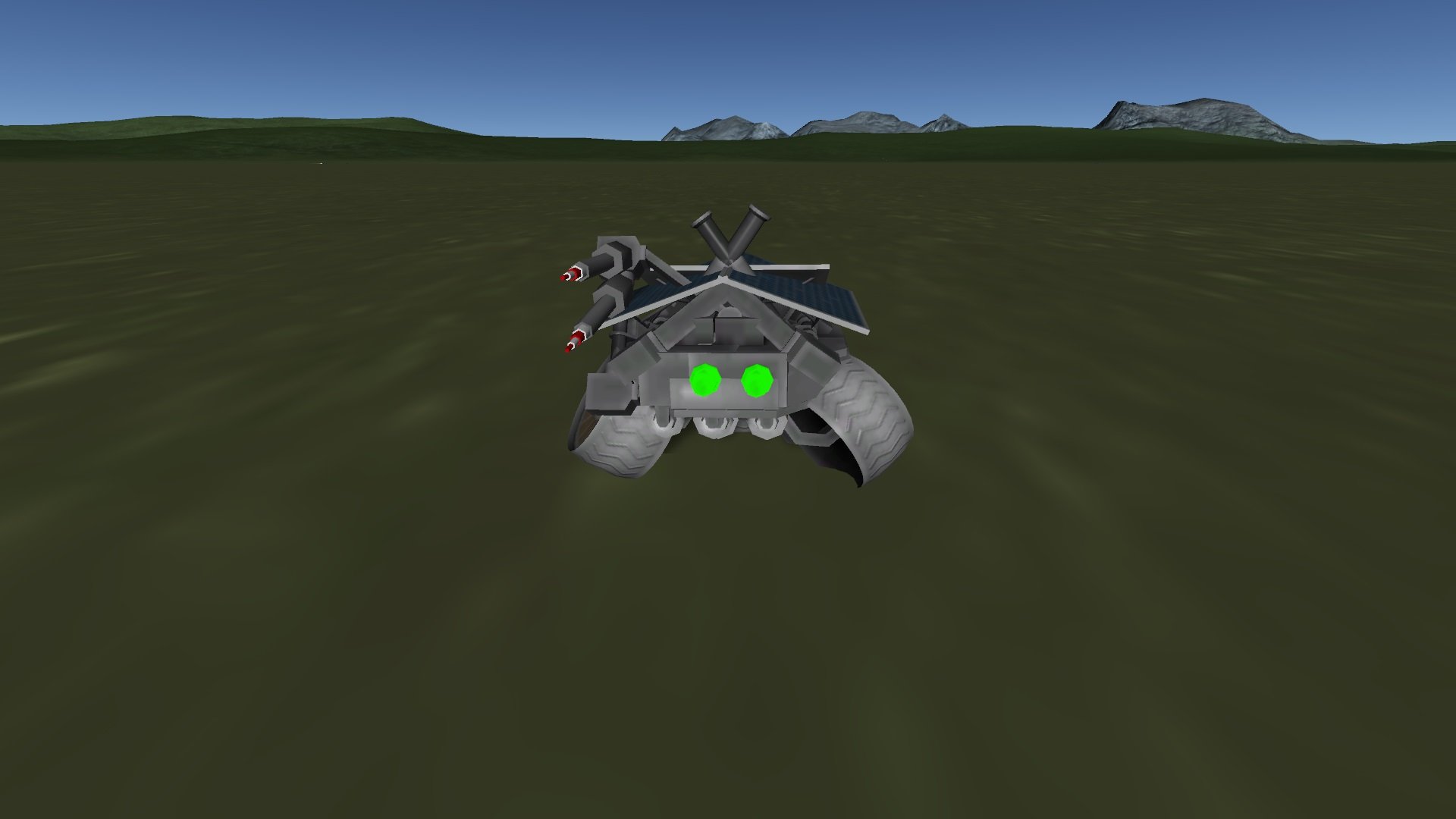
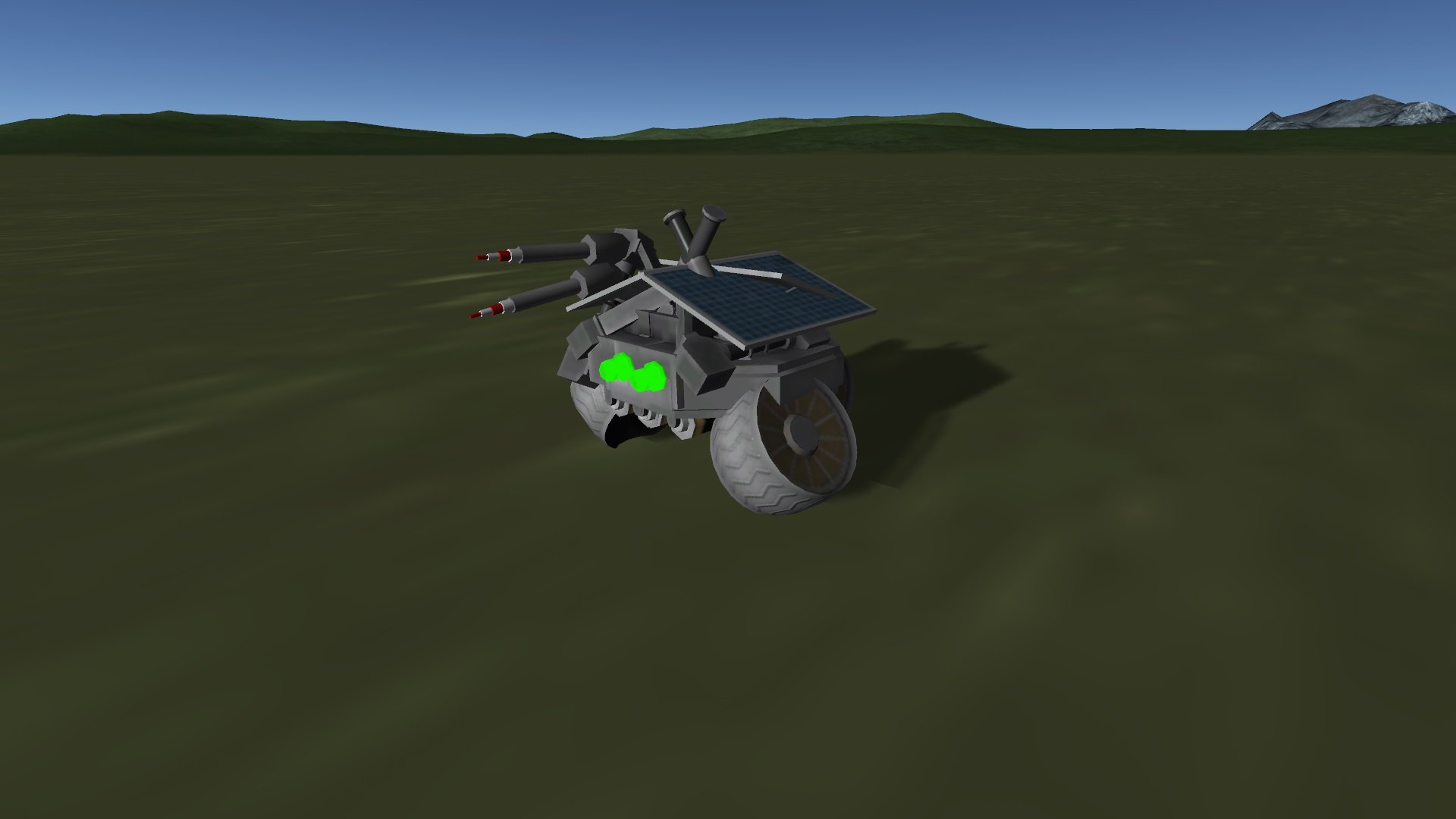
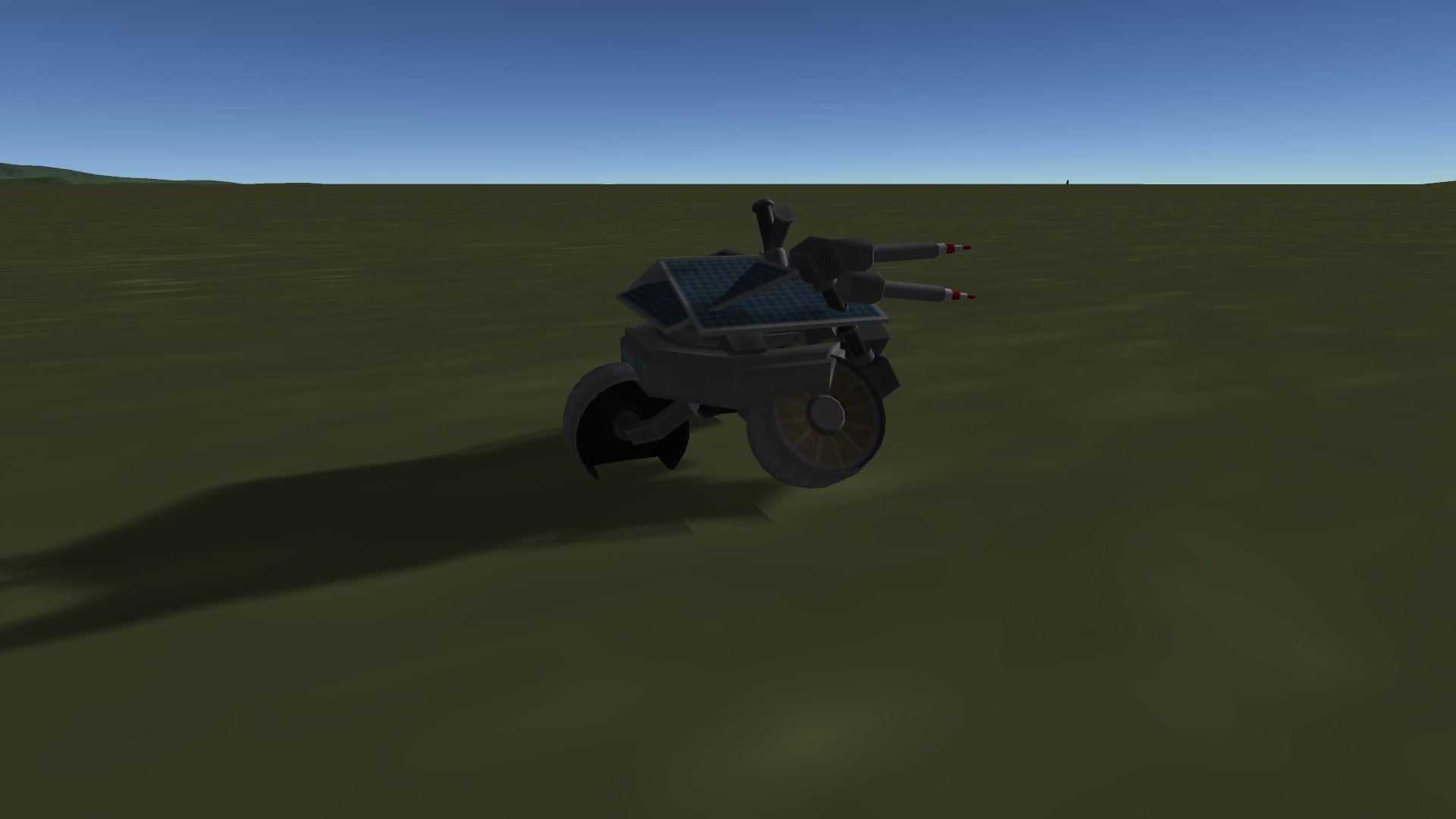
Bay Нагибатор - Двухколёсный робот со встроенным SAS модулем, позволяющим не только держать равновесие, но и приподымать/перевозить небольшие грузы, при наличии на них малого док порта. Весьма подвижен. Способен имитировать прыжки с переворотом при пониженной гравитации. Снабжён малой антенной «4», поэтому, для работы на отдалённых планетах, требуется ретранслятор. Для выхода из Bay используются малые пороховые ракеты с пониженным импульсом - клавиша «5», одновременно отцепляет док порт. Для удобства управления установите контроль на док порт.
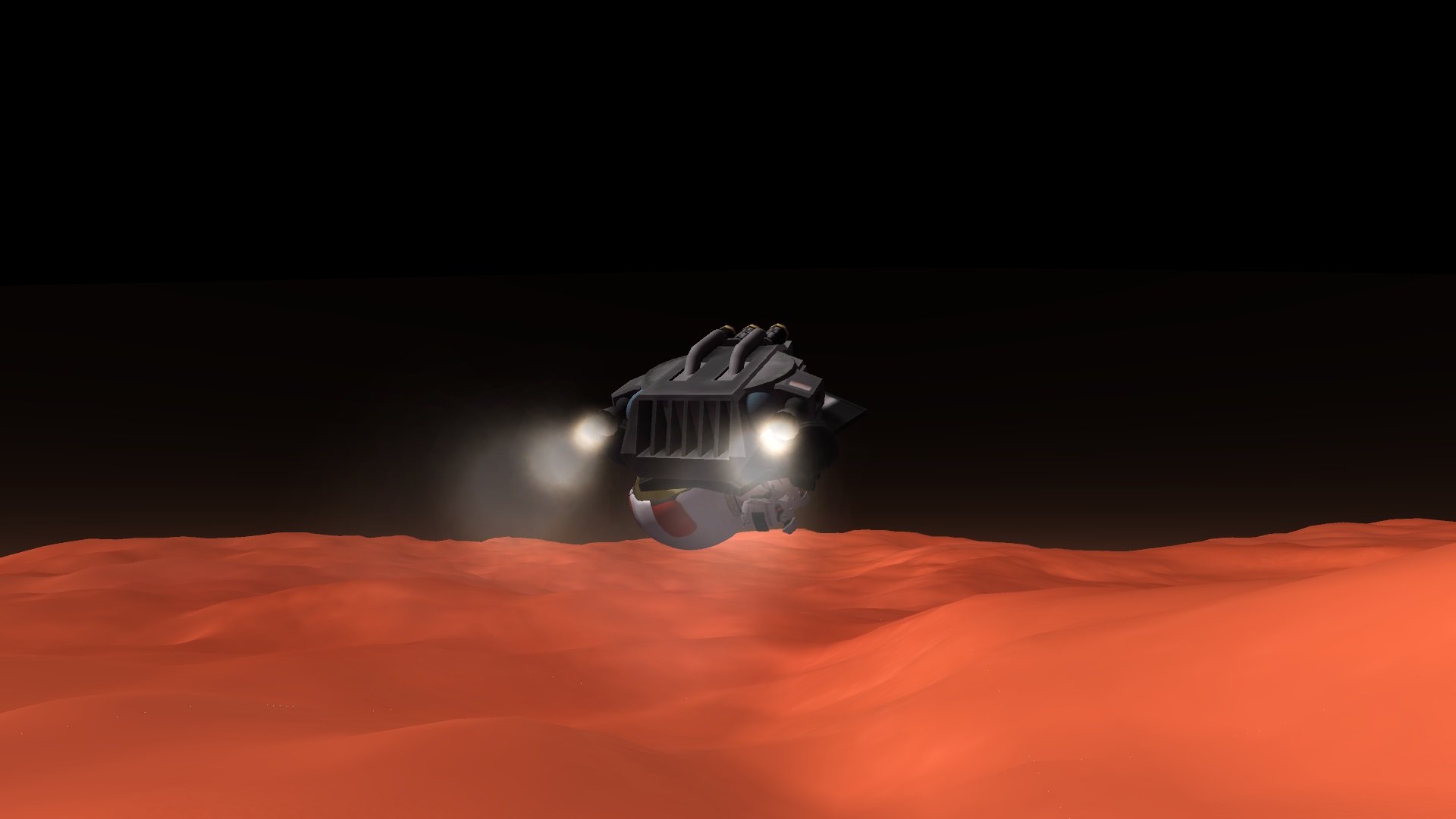
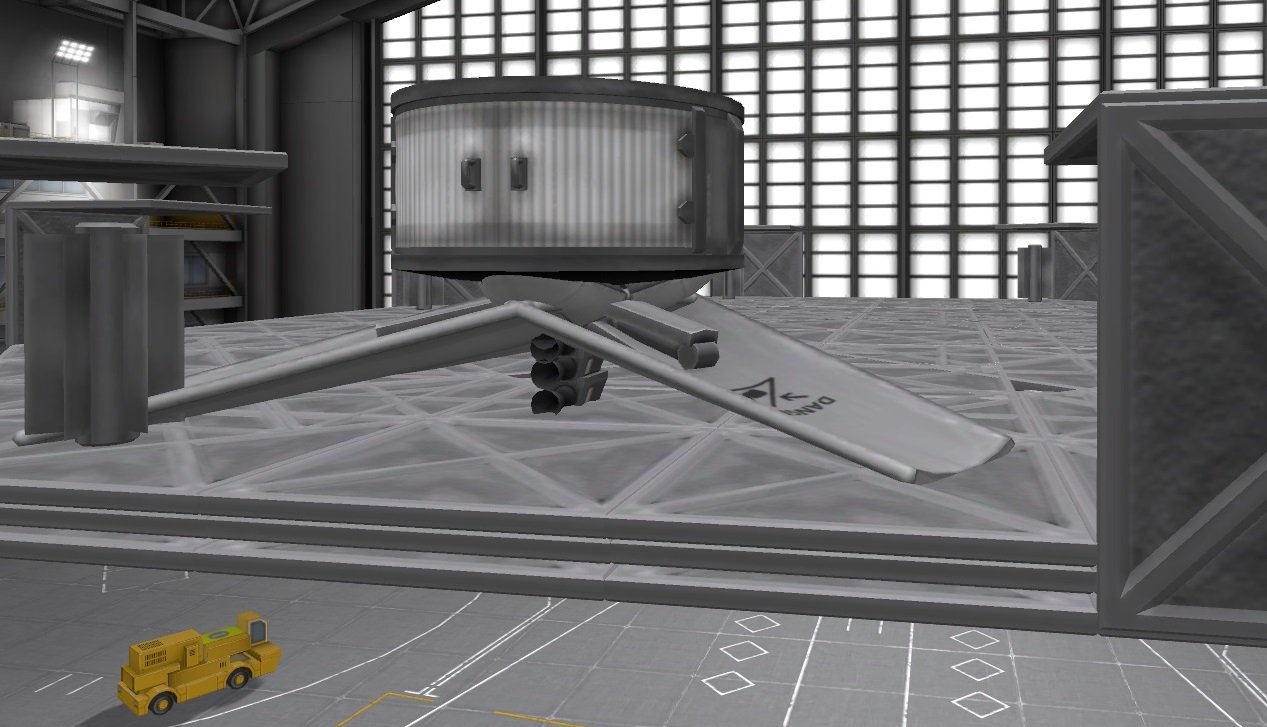
Bay Bat - Летающий бот с возможностью утащить кербонавта. Секрет весьма прост, если установить имеющуюся лестницу вдоль корпуса, то кербонавт будет постоянно сползать и падать, а если поперёк, то вроде-как и держится, но шибко маневрировать не получится. Своими лётными качествами обладает только в условиях пониженной гравитации. При этом посадочные качества, оставляют желать лучшего.
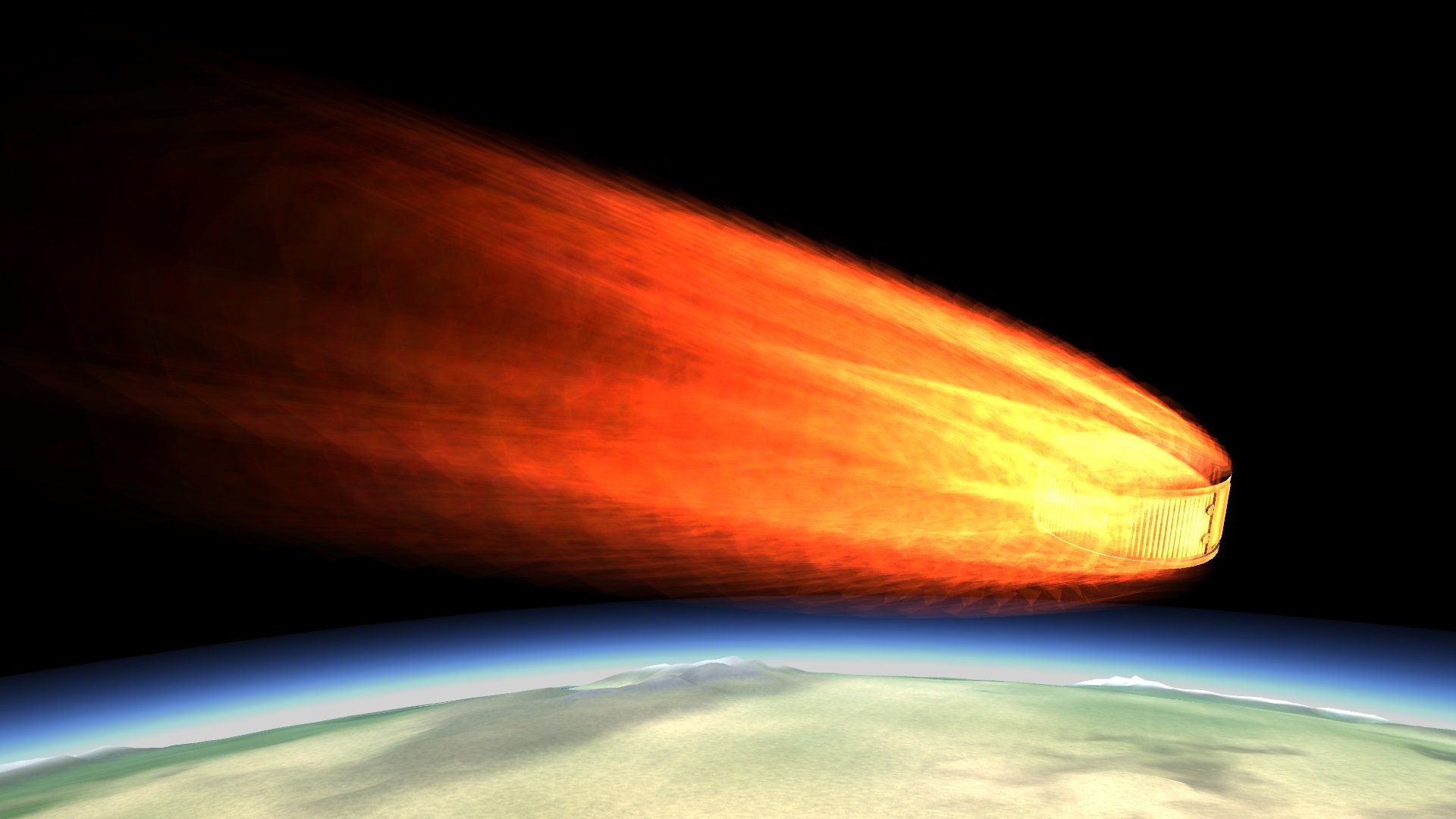
Bay Спас капсула - Капсула для спуска одного кербанавта на поверхность планеты с атмосферой. Если вы пилот, то проще, если нет, то придётся удерживать курс вручную. Используются 4 пороховых ракеты с пониженным импульсом. Для попадания в примерную точку посадки, при невозможности потушить ракеты, капсулу можно раскрутить для равномерного радиального импульса. Bay достаточно стоек к высоким температурам атмосферного сжатия при входе в неё. Ближе к поверхности открываем Bay - это снизит скорость до допустимой для использования парашютов.
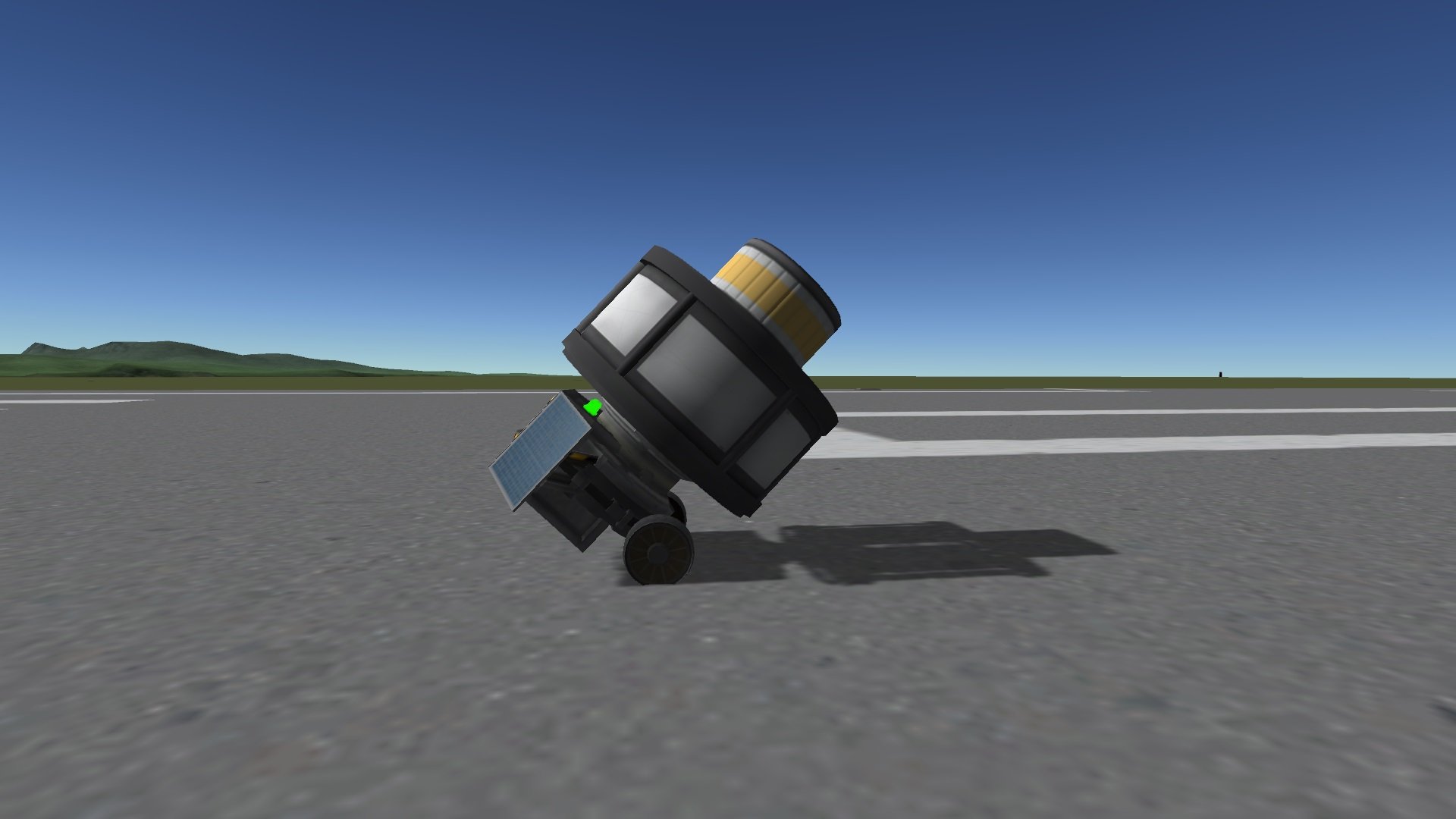
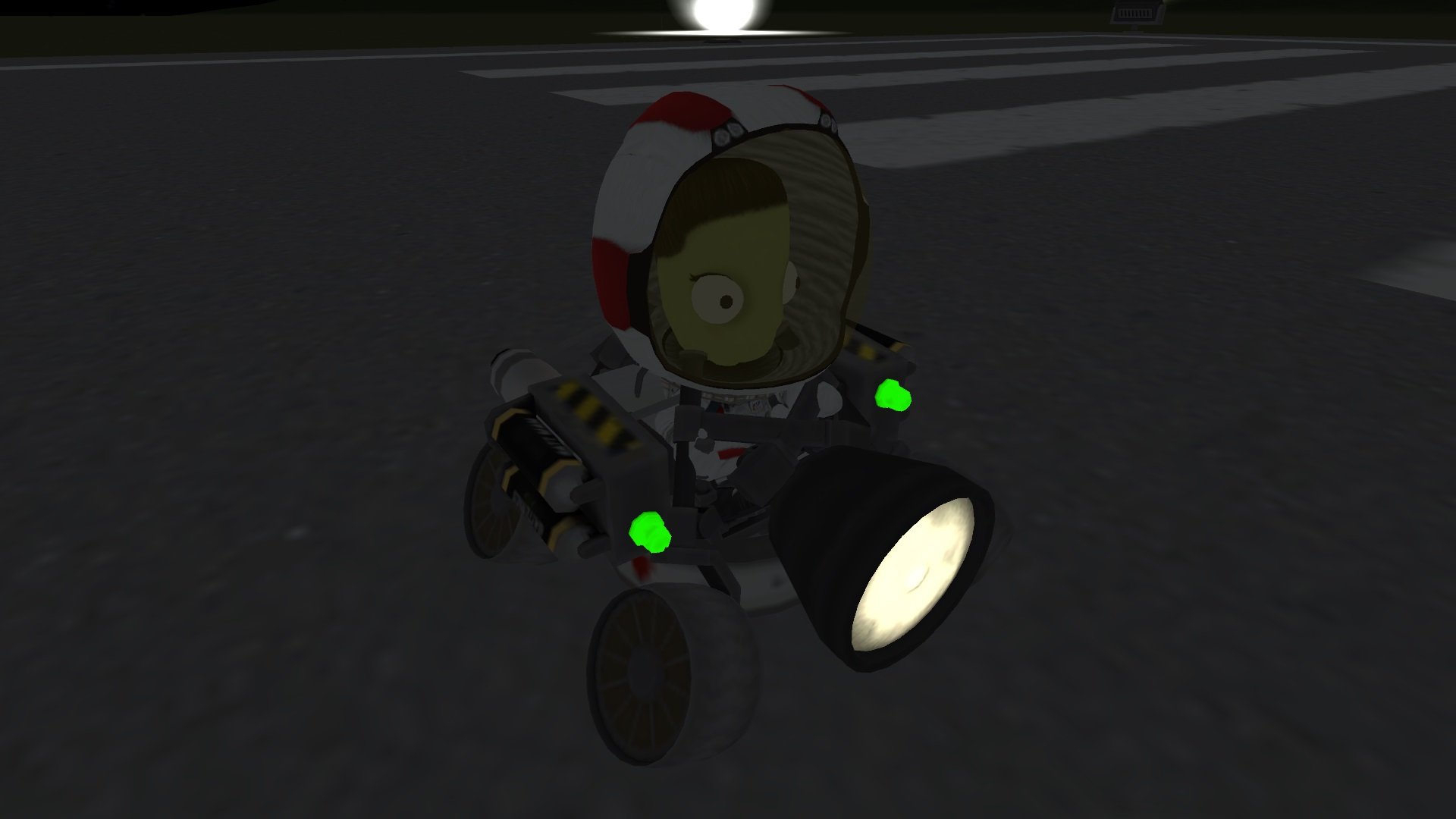
Bay Карт - Одноместный электромобиль. Весьма капризная машина, в плане изымания из Bay. На видео не было видно, как его, в буквальном смысле, выпинывает малая опорная нога. Скорость 10,5 м/с с закрытой солнечной панелью и 10,1 м/с с расправленной. Можно и гораздо быстрее, используя пороховые ускорители, но весьма недалеко...
Bay Жук - Весьма забавный и манёвренный ровер… Был… Но в связи с обновлением 1.2.2 он перестал им быть. А точнее сказать, ему стал почти полностью противопоказан Bay. Что привело к моему упадническому настроению и проект «Micro II» был полностью заброшен примерно на год. В версии 1.2.1 все подобного класса роверы, могли те только беспрепятственно выехать, но и проехать насквозь, не шелохнув Bay. Однако на видео он всё-таки попал, да ещё и типа как, был перевёрнут. Хотя признаться, перевернуть его и заставить так лежать дорогого стоило, даже пришлось бросить кадр, как Bay Карт самостоятельно уехал после столкновения. Bay Жук положил начало этого выпуска.
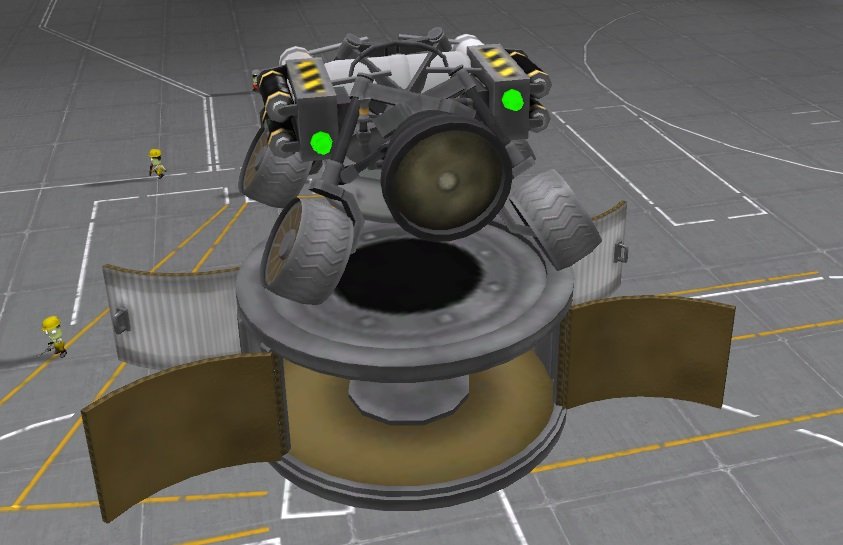
Bay Стальные яйцы - Некий, пристёгиваемый интерфейс кербанавта, позволяющий летать в невесомости или при малой гравитации. Даже меньше чем Duna=). Там он конечно тоже полетит, если осушить баки наполовину. Символизирует отвагу Джеба.
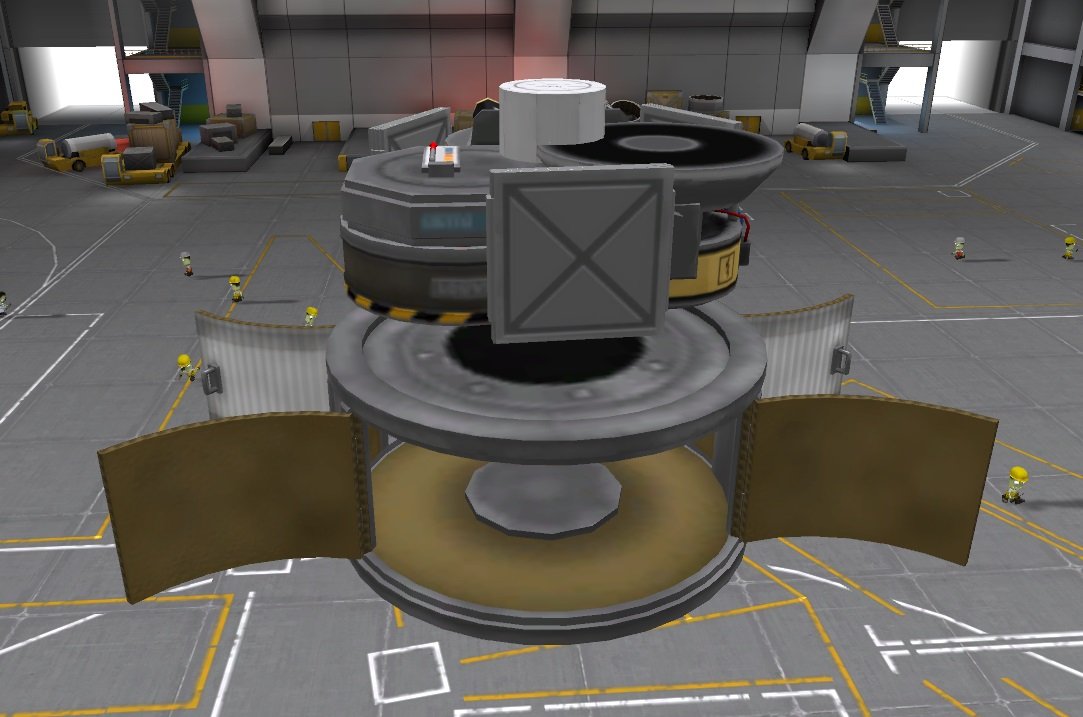
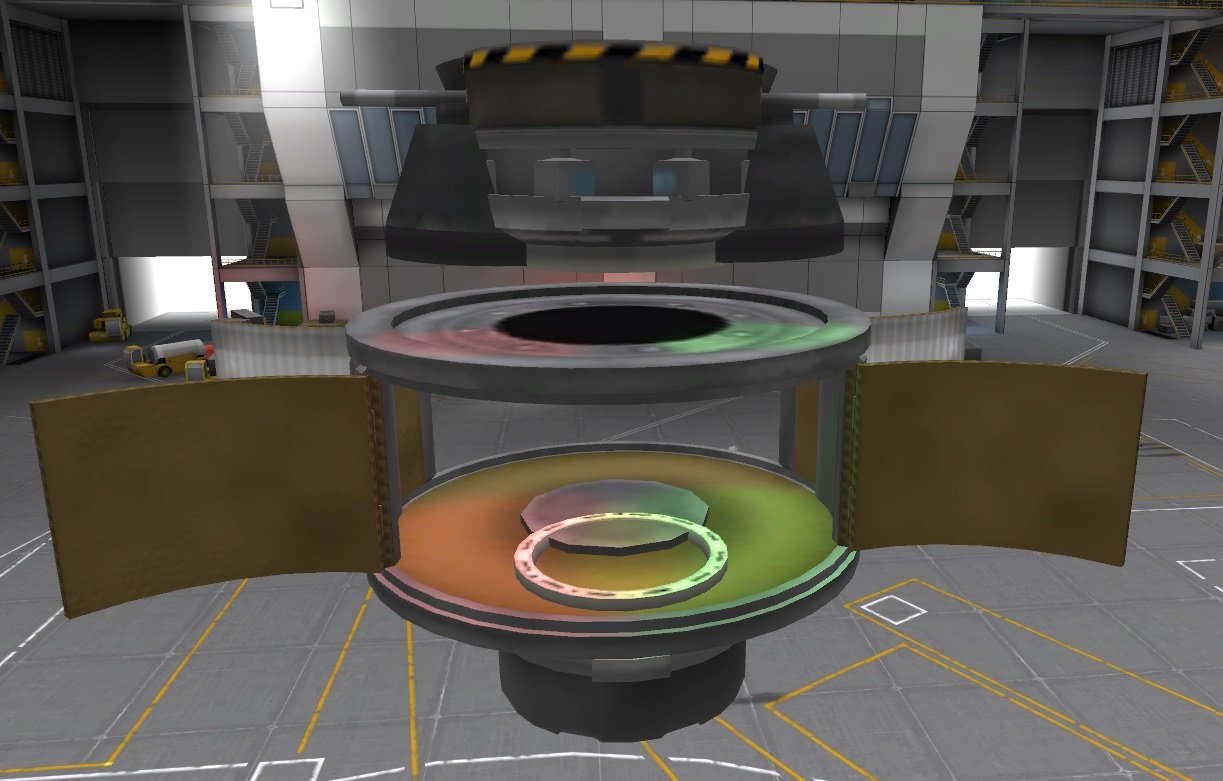
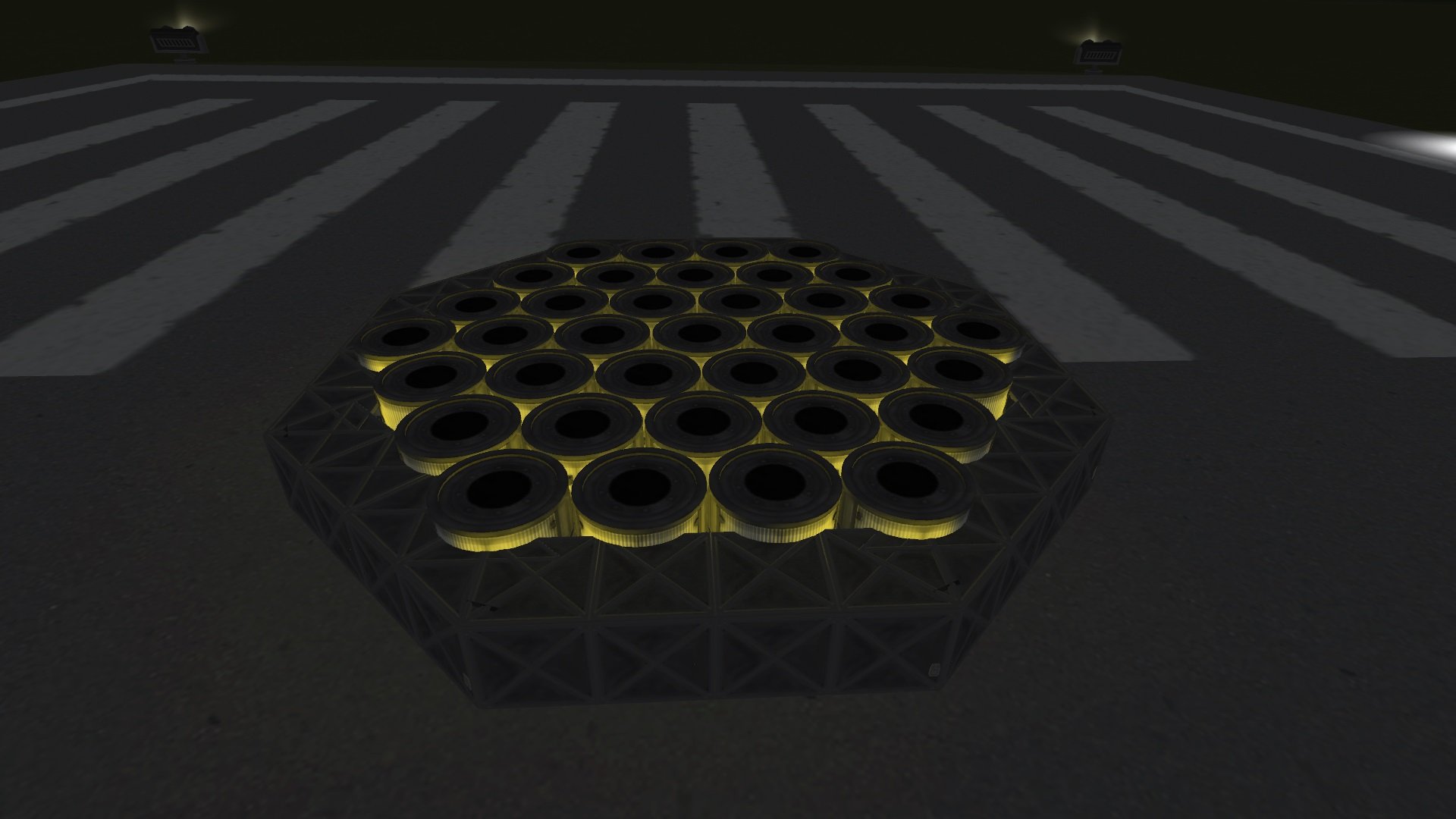
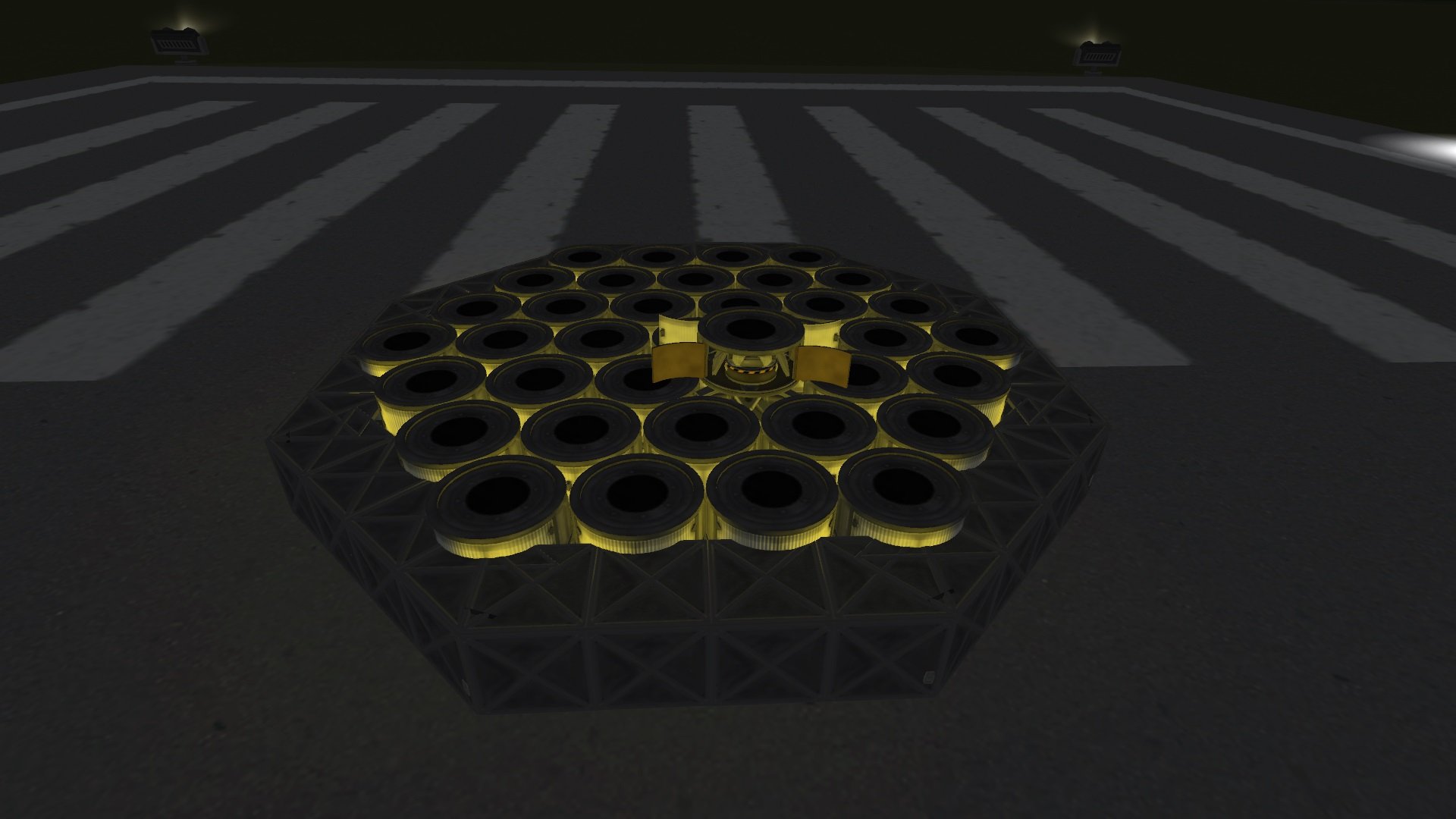
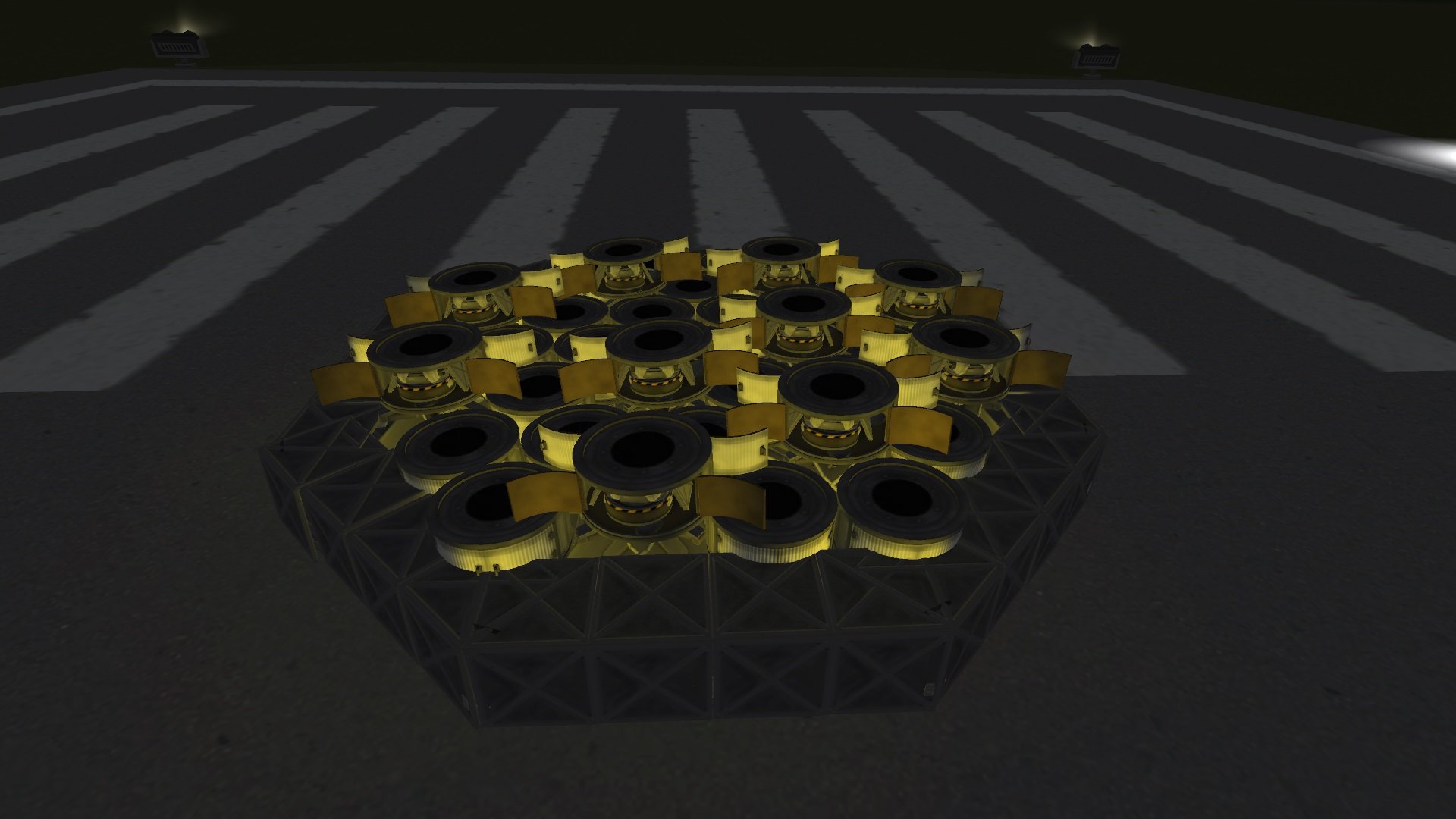
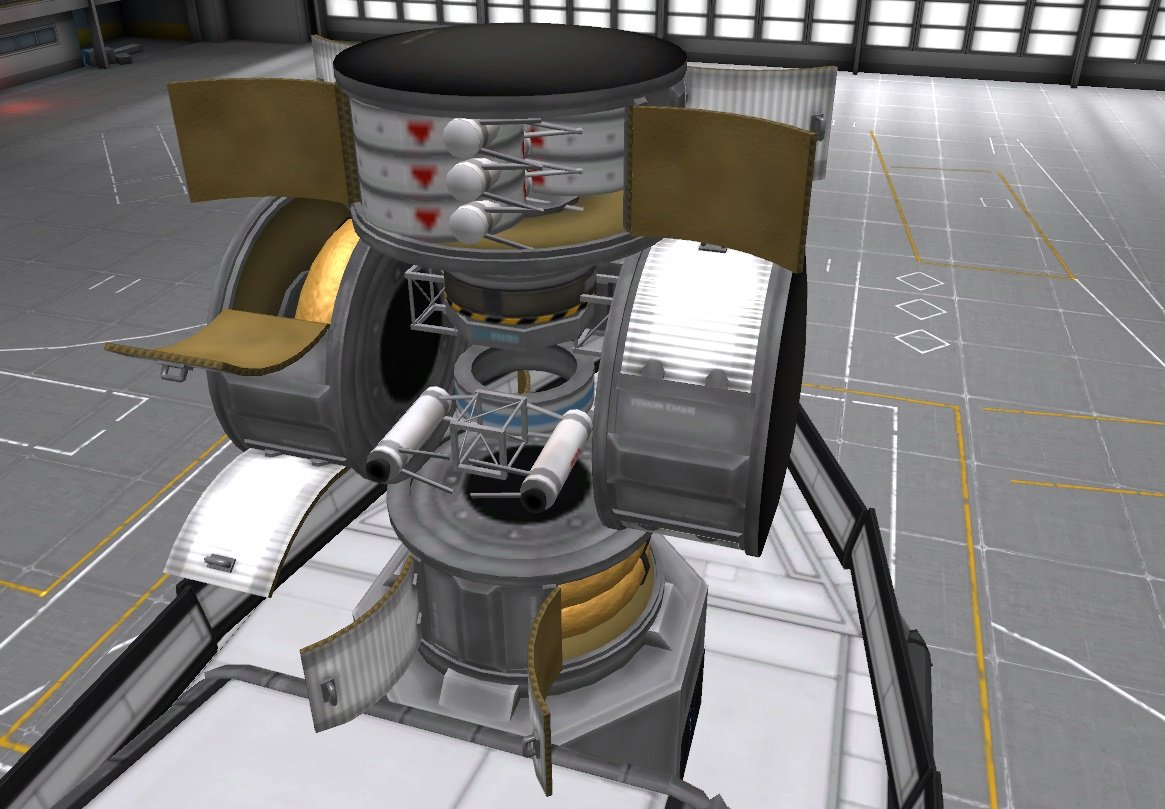
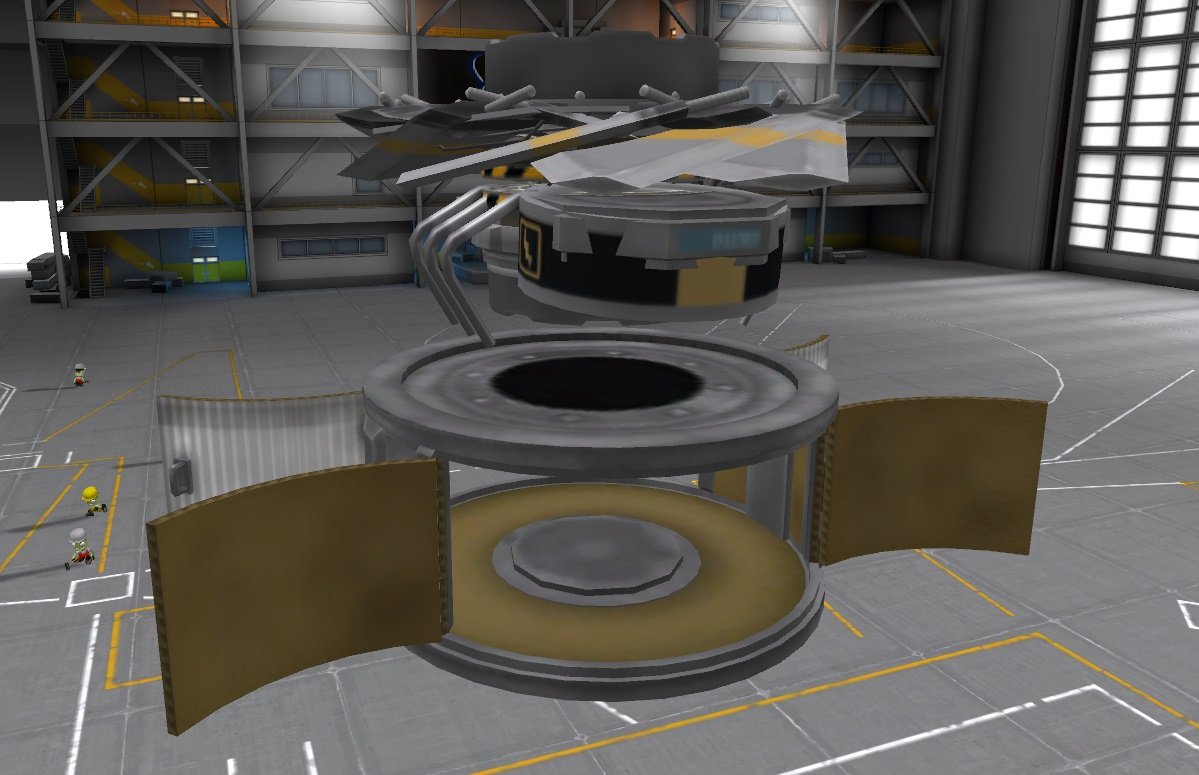
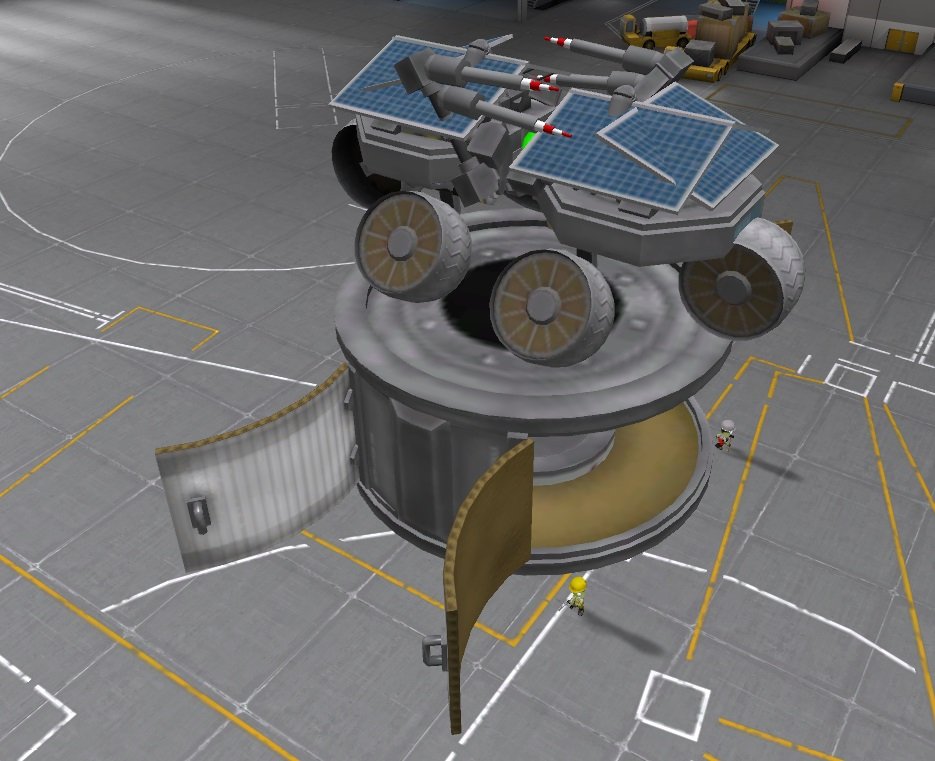
Улей - Платформа с подъёмными Bay, по одиночке или кучей. Как это работает: Каждый приспособленный для подъёма Bay снабжен 3мя воздушными тормозами, образующими треногу. Для цельности конструкции, Bay скреплён с корпусом натяжной пружиной. А для того, чтобы подымать Bay, а не конструкцию целиком, предусмотрено тройное дно. Среднее дно является отдельной деталью, удерживаемою двумя остальными. Собственно, среднее дно и является опорой для подъёмного механизма каждого из Bay. Желтоватый оттенок придают прожектора.
Bay Пчела - Летающий RCS бот способный заправляться на специальных заправочных точках. Ну может ещё способен перевезти крохотный груз с малым док портом. На этом его функционал заканчивается.
Барракуда - Малая одноместная подводная лодка. Принцип балласта довольно стар, но всё же: в Bay клиппингом заключены контейнеры полные руды. Далее роль играет объём который видит игра. Если Bay закрыт, то объём считывается с размера Bay (лодка тонет), если открыт, то игра видит объём всего содержимого отдельно (лодка всплывает). Подшипник для двигателя выполнен из колёс и цилиндра, только на этот раз колёса не обжимают, а наоборот распирают цилиндр изнутри. Сам двигатель – это спрессованная куча SAS модулей, окружённая крыльчаткой. Отделяем двигатель от основного туловища и, переведя управление на него, зажимаем «Alt+E» до максимального сведения показателя крена. Клавиша «5» меняет угол атаки крыльчатки. Малый угол атаки используется на старте или для повышения мощности толчка, Большой для развития максимальной скорости (7м/с). Чтобы лодку не так сильно вращало по оси крена, переключите управление на док порт в передней части. Для остановки двигателя включите на нём стабилизацию «T». Установлен Bay с управляемой ракетой (или жалким её подобием). Крафт легко переносит ускорение х3 и сохранение.
«1, 2» управление передним, задним балластами. «3» открытие Bay с ракетой. «4» пуск ракеты. «5» угол атаки крыльчатки. «7, 8, 9» активация антуражной части (перископ, воздухозаборник, антенна)
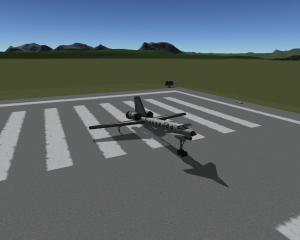
Корабль - Простенькое судно, собранное на скорую руку. Двигатель заимствован у Барракуды. На передней палубе разместился самолёт «Вертикаль» На задней палубе расположена шестизарядная пушка на двухосевом шарнире. Нажатием «Space» освобождаем его от транспортировочного крепления, Клавишей «8» открываем пушку и Огонь!!! Шарнир можно использовать не только для пушки. Все узлы корабля выдерживают сохранение в любом положении.
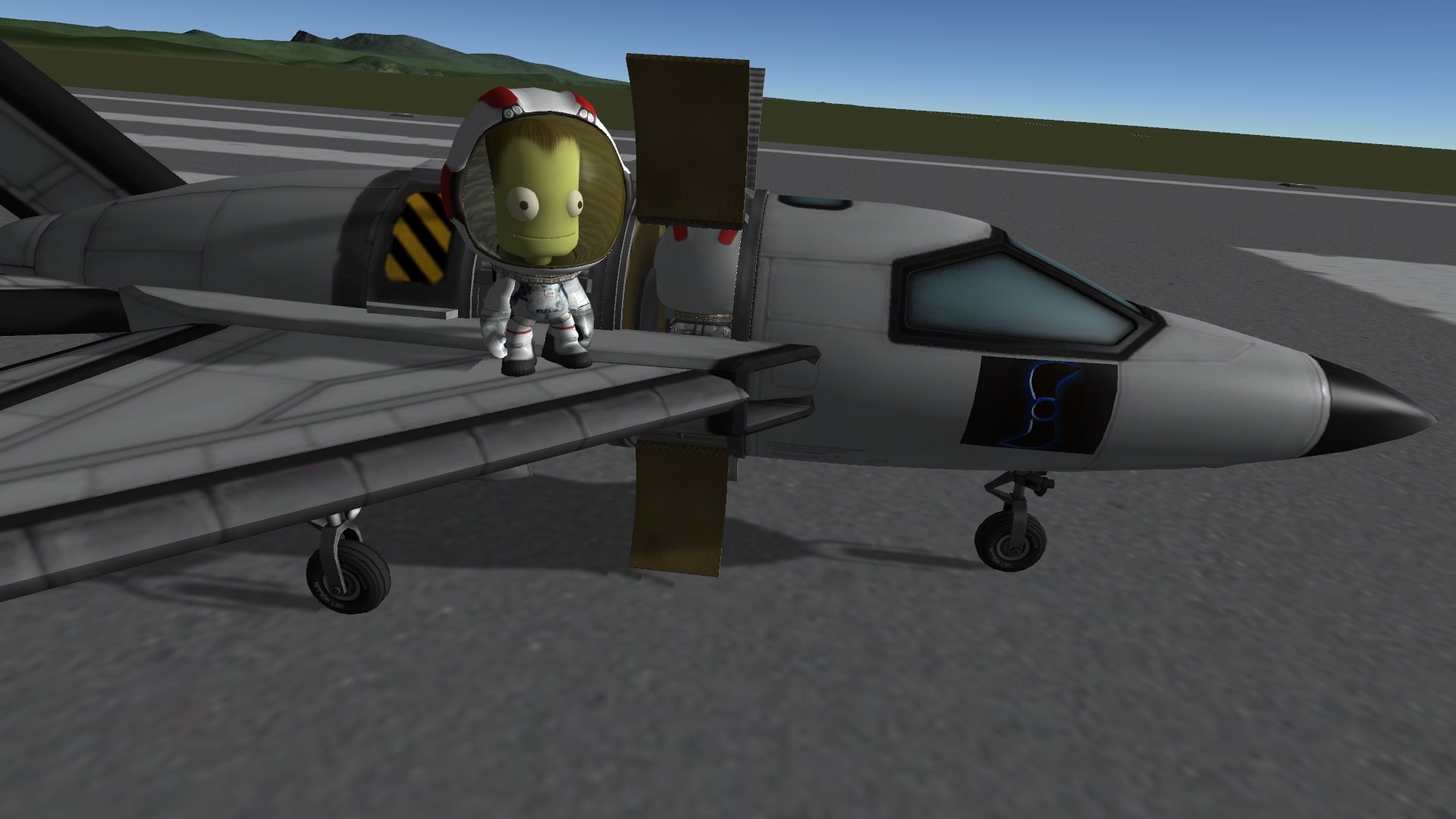
Вертикаль - Самолёт с вертикальным взлётом. Думаю, любители пилотирования оценят данную модель по достоинству. Манёвренности ему не занимать. Выполнен в нескольких модификациях: Минимум, Турбо, Несущий Bay два места (+2К, именно он фигурирует на видео) и ракетный. Последний взлетает при включении всех двигателей.
«1» вертикальные двигатели «2» горизонтальные двигатели «3» Bay Реактивный «4» Bay 2 места
Минимум Турбо +2К Ракетный Масса 3.341 3.613 3.541 4.997 Кол-во дет. 23 28 26 47
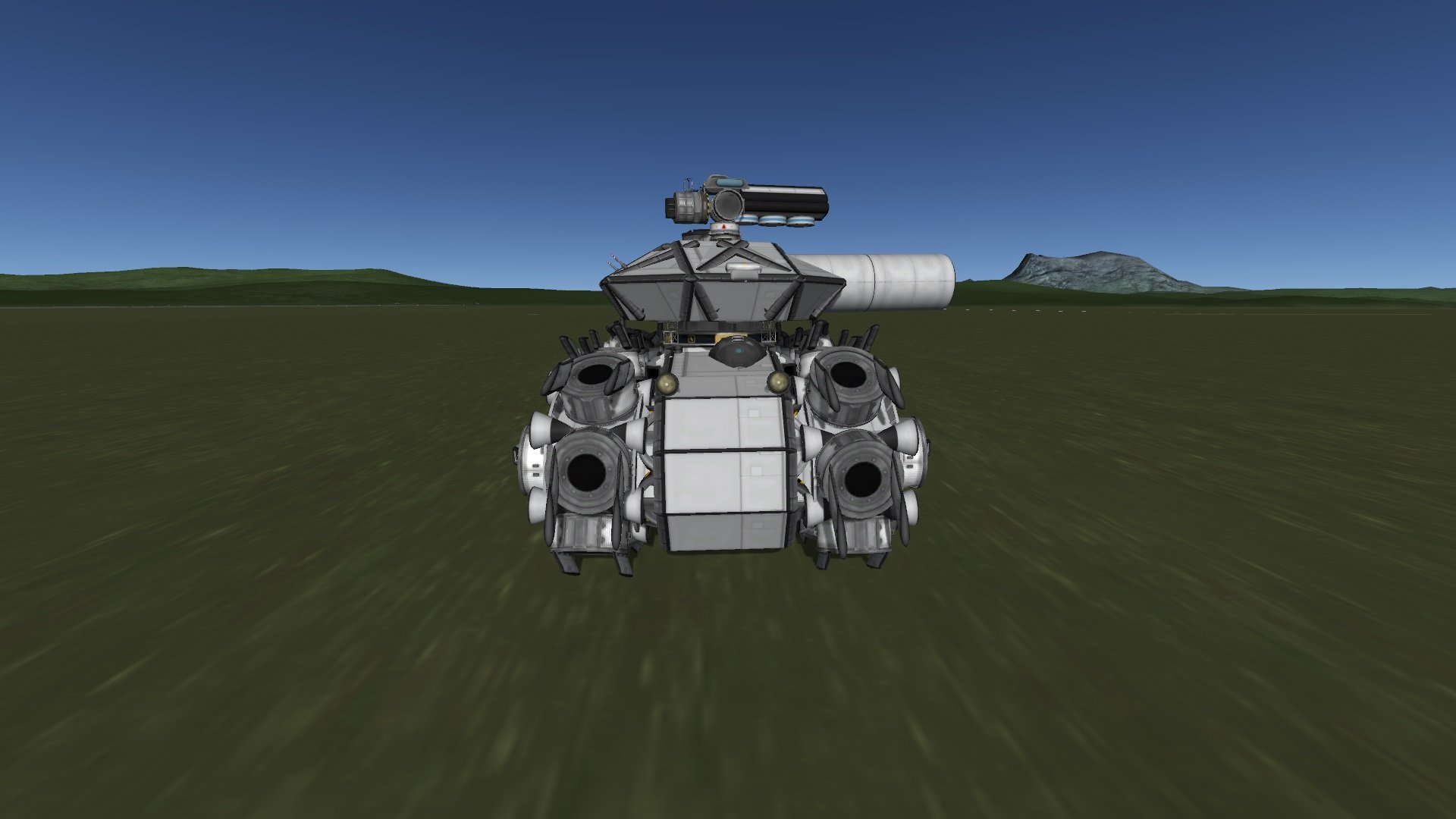
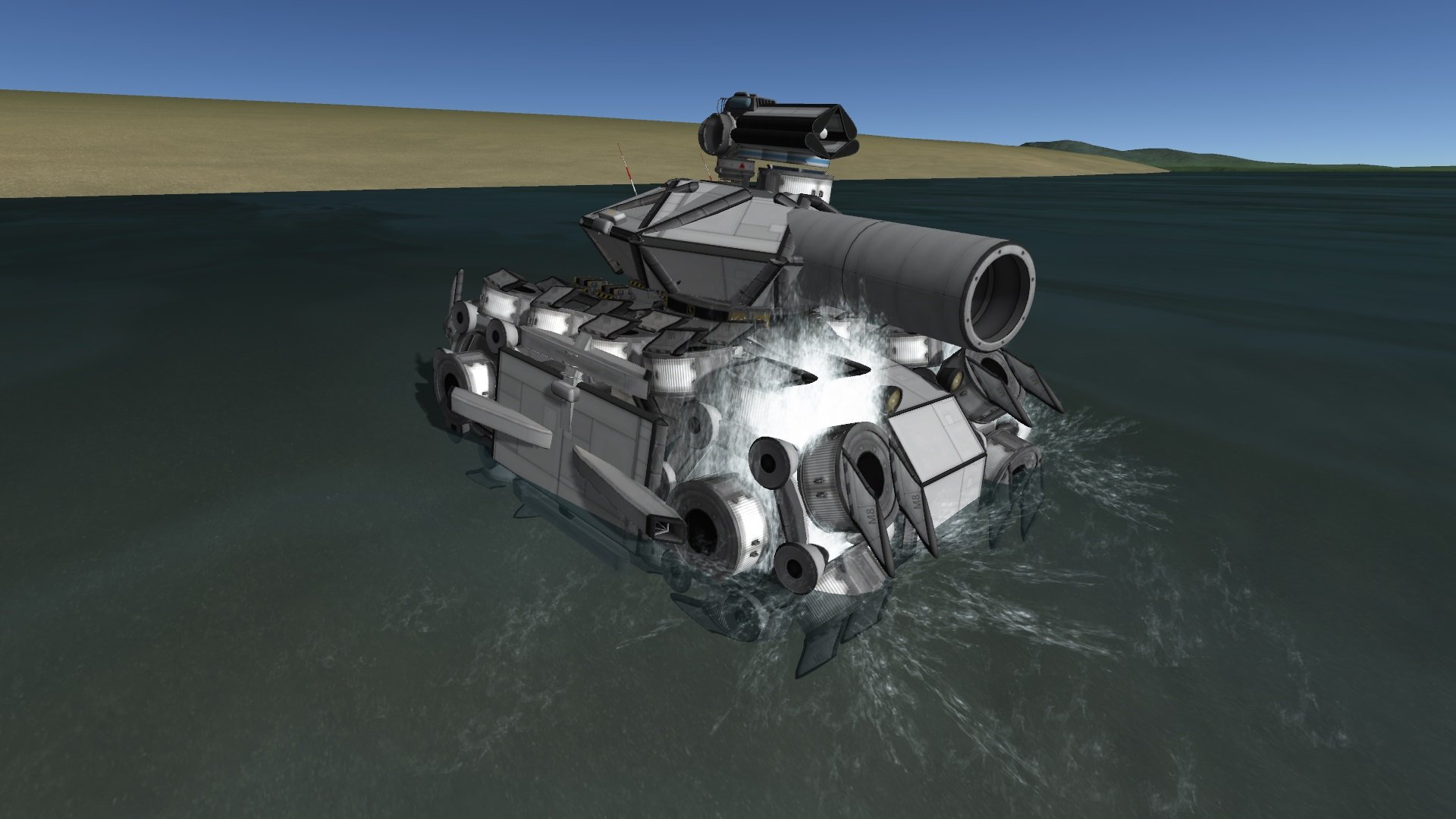
Танк - Как то не приходило в голову, но когда увидел забугорный вариант на форуме, решил, надо делать свой! И вот. Полное управление башней и гусеницами из одного модуля. Думаю, мало кто откажет себе в удовольствии прокатится на этом чуде. Правда, чтобы запустить эту малютку, потребуется немало времени. Но оно того стоит. 1: В 3 этапа жмём «Space» : отделить ось башни (всё та же Bay пружина); отделить траки; отделить двигатели. 2: Активировать оба стопа клавишами «1, 2» (2 Bay створками цепляют задние двигатели) 3: Эм… Клавишей «{» переключаемся на двигатели (их 4 штуки) и активируем на вращение. По порядку: Лев.зад. - «Alt+E»; прав.зад. – «Alt+Q»; прав.пер. – «Alt+Q»; лев.пер. – «Alt+E». Клавишей «}» на исходную. 4: Открываем Bay на башне («5» или вручную), ищем там модуль управления и устанавливаем контроль на него. Закрываем. 5: Поехали! «1, 2» отпускаем тормоза. Эти же клавиши, как наши рычаги активации гусениц. Правда заднего хода нет (есть, но…). Скорость хода по кербину 6м/с по воде 1,2м/с (на Лайче 7м/с выдавал). До того, как были установлены грунтозацепы, скорость достигала 12м/с, но при попытке повернуть траки обязательно рвёт. Если попробовать сделать плавные тормоза, то возможно грунтозацепы удастся снять. Сверху установлен “пулемёт” на тестовом шарнире (не самом удачном), если мешает, рекомендую снять.
«1» левый стоп «2» правый стоп «3» антенны на башне «4» лестницы «5» открыть башенку управления
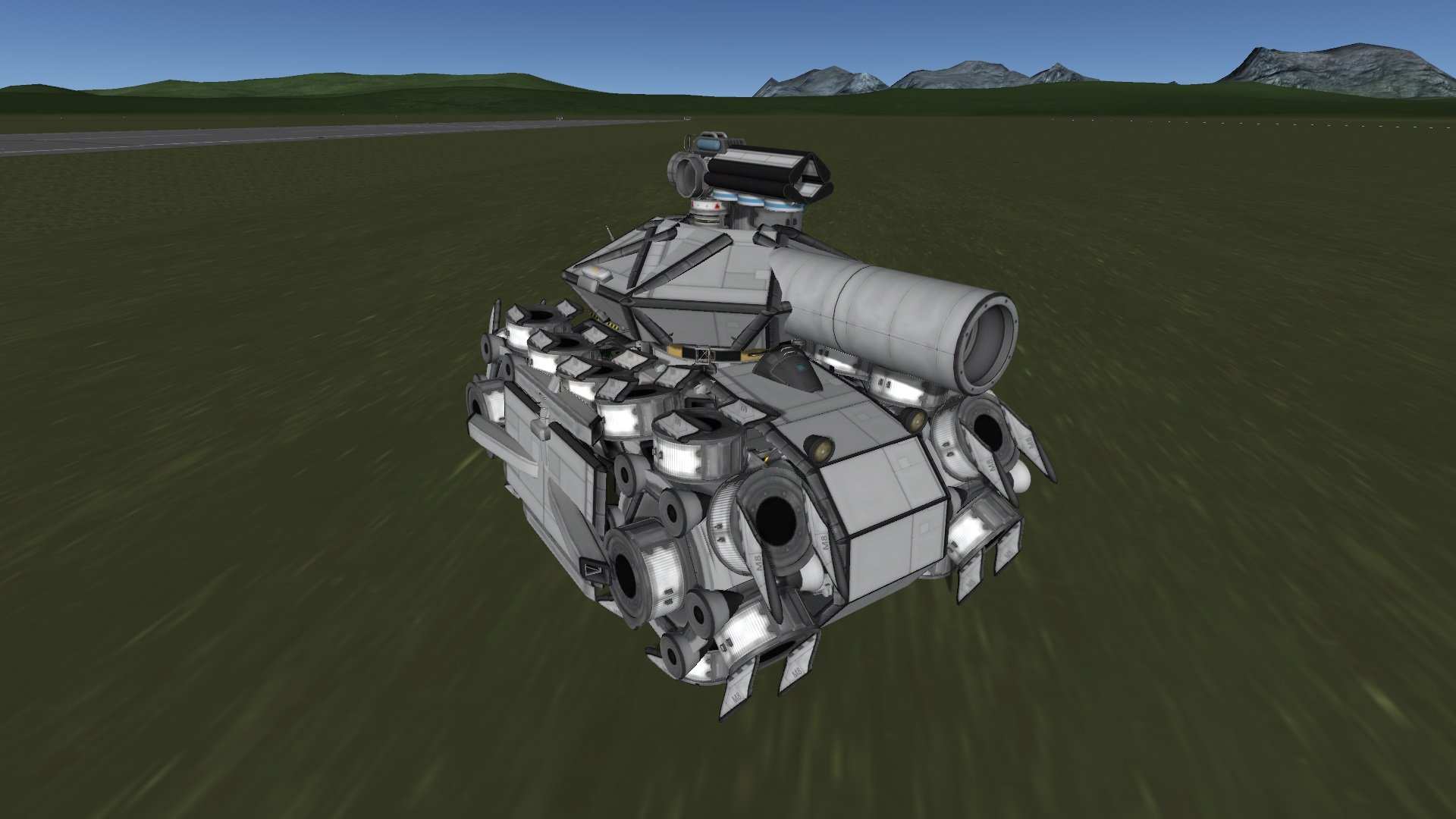
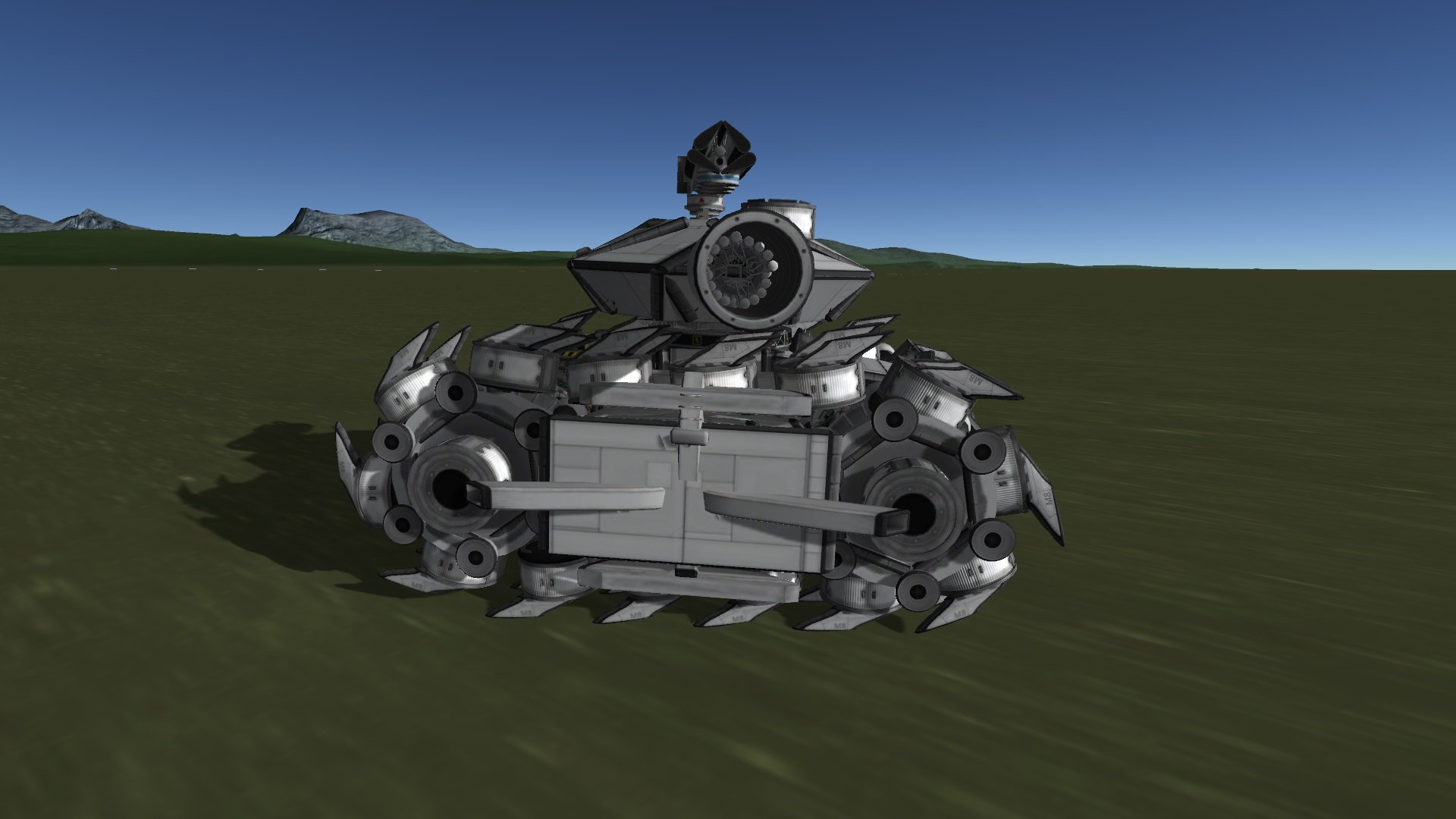
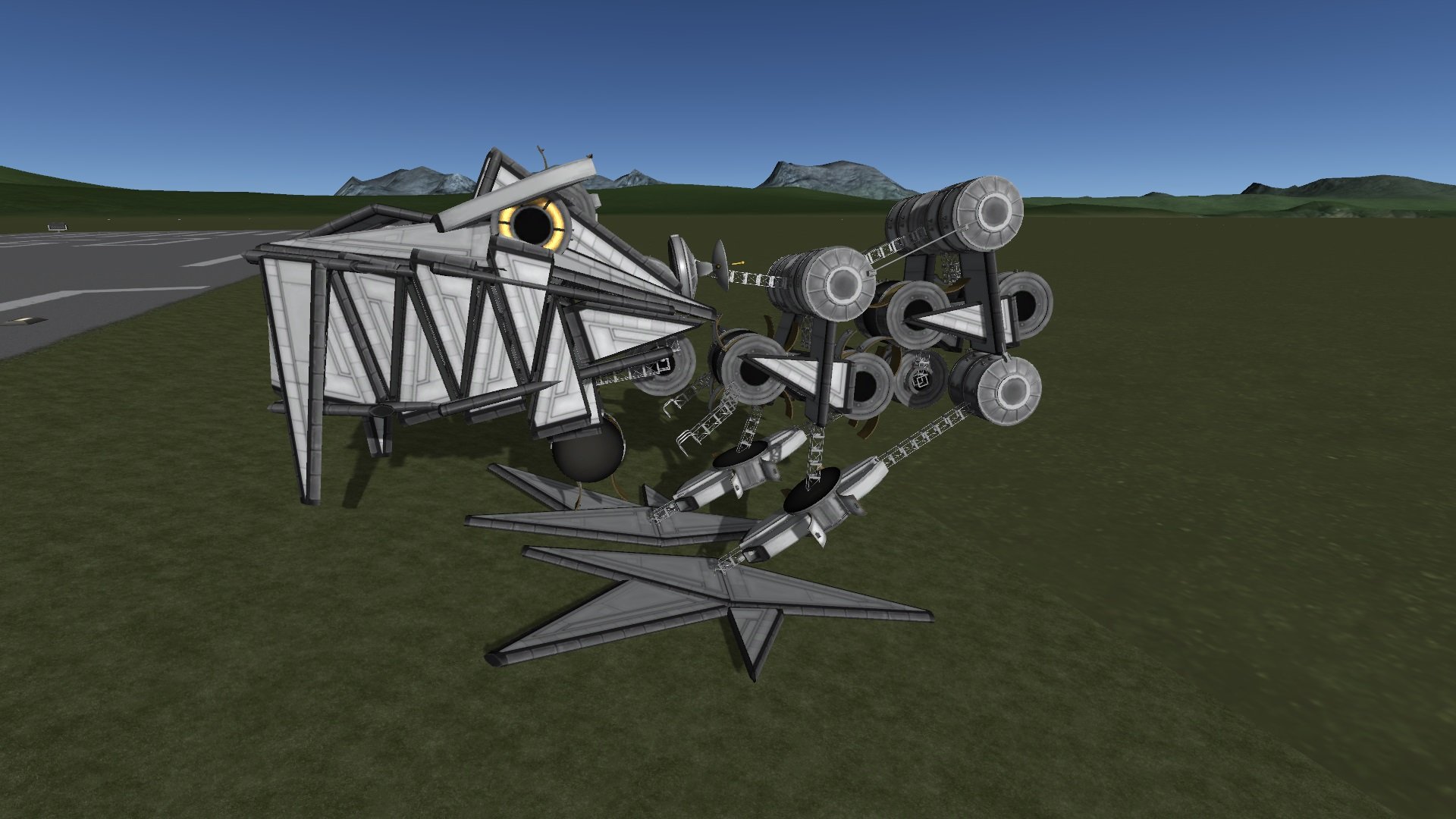
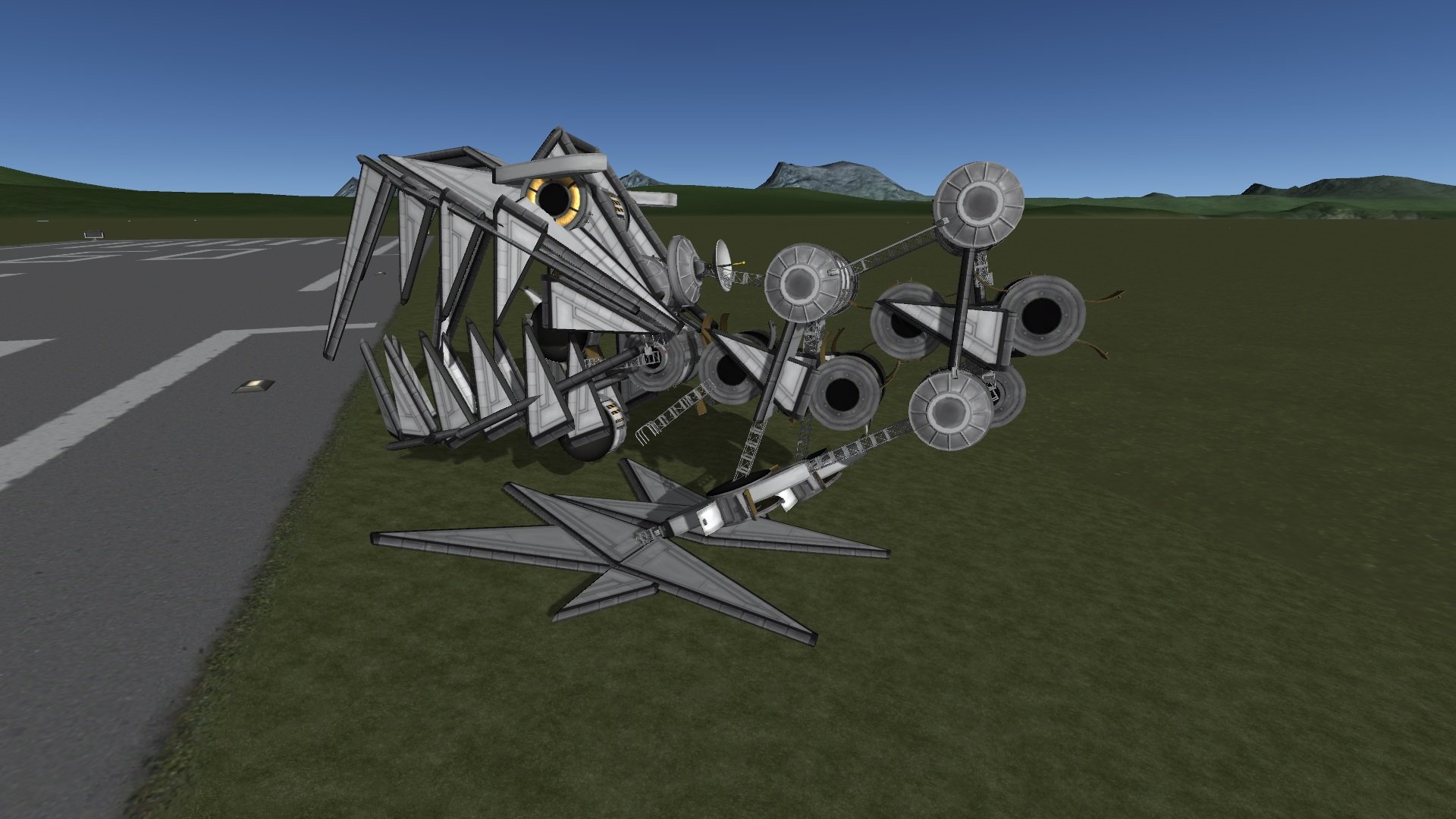
Чудище - Пожалуй главная изюминка этого выпуска. Двуногий шагоход на стоке. Причем результат превзошёл ожидания. Машина получилась весьма надёжная. Поломки конечно случаются, но довольно редко. Робот спокойно переносит сохранения в любом своём положении. Достаточно устойчив. Может развернуться на насыпи взлётно-посадочной полосы. Я бы даже сказал, что для того что бы его уронить, потребуются значительные усилия. SAS используется для поворота или удержания на курсе. Может идти как вперёд, так и назад, поворачивая в право в лево. Для старта требуется задрать тангаж «S» и «Space» чтобы активировать малые ракеты на голове, до тех пор, как “ножки встанут в ушки”. «Space» для отстреливания ракет. Далее, вручную меняем положение 4х Bay на ногах с одной стороны. Сперва закрываем, потом открываем те что были закрыты (сторона значения не имеет) Можно трогать! Есть 2 пути: жмём «2», как только открытие/закрытие соответствующих Bay`ев завершится наполовину, жмём «1», и так далее, два, раз, два, раз, два, раз… Или, жмём «2», так же до половины, а далее начинаем быстро нажимать «4». Клавиша «3» открыть/закрыть челюсть. Собрана с применением того же механизма, что и ноги. Если верить приборам, то скорость такой ходьбы 2,2м/с. Ну, чуть-чуть быстрее чем бежит джеб (2м/с). Если не считать множество отдельных частей (всего их 9), то можно сказать, что робот состоит из 2х частей: ходовая и противовес (в данном случае голова), обе массой примерно по 5т. Да, кстати… Ай-яй!!! По рукам надавать! При съёмке Чудища, был использован чит «Alt+F12». Дело в том, что робот до этого проверялся только на Кербине, при тамошней гравитации, а на Duna он начинал передвигаться сильными прыжками. В общем, было решено, увеличить гравитацию на Duna в 3,4 раза. При должном изменении нужно было заменить голову робота цельной морковкой. Примерно также стыдно мне.
Нетто Брутто Масса 9.699 10.004 Кол-во дет. 309 314
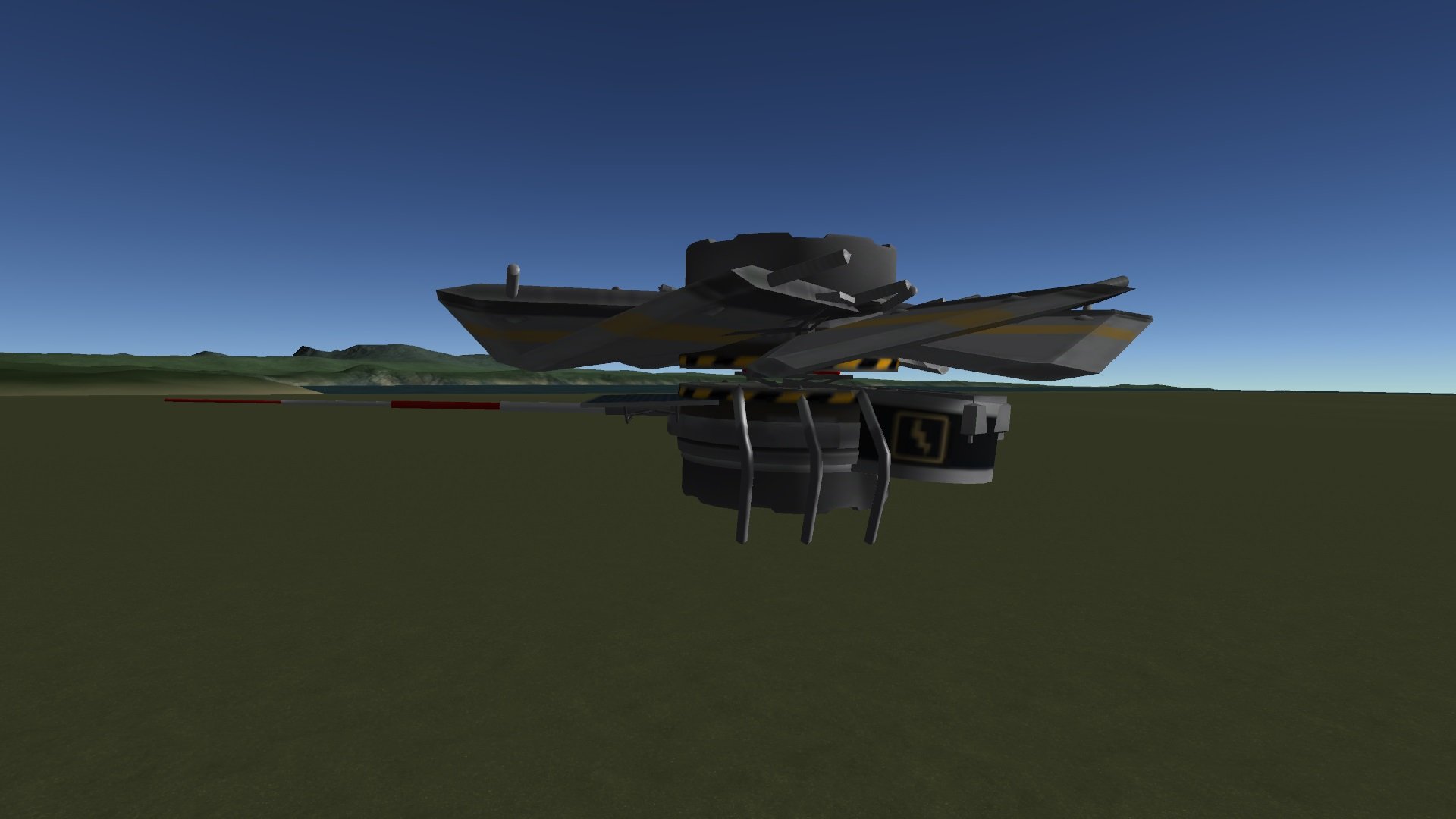
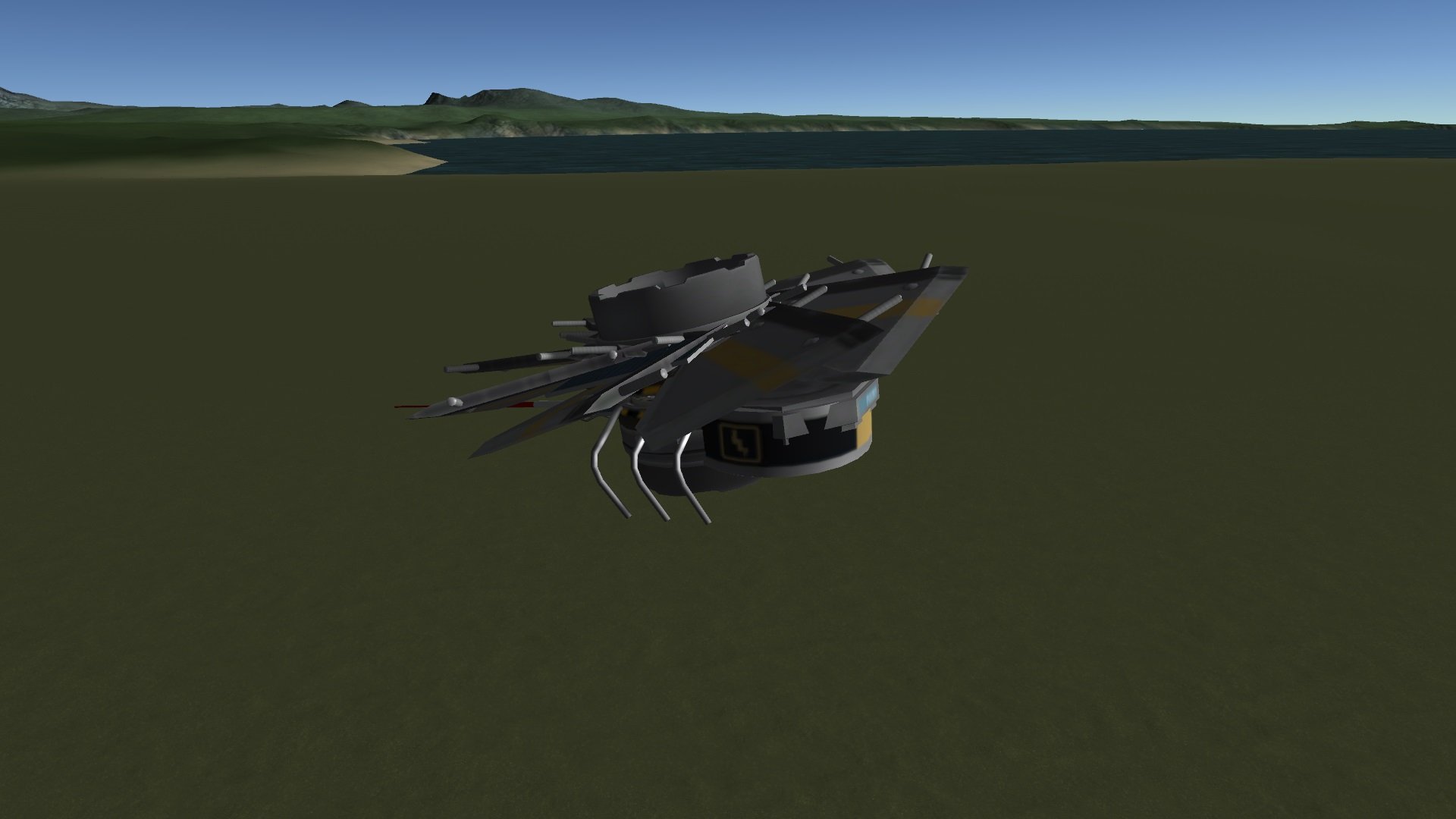
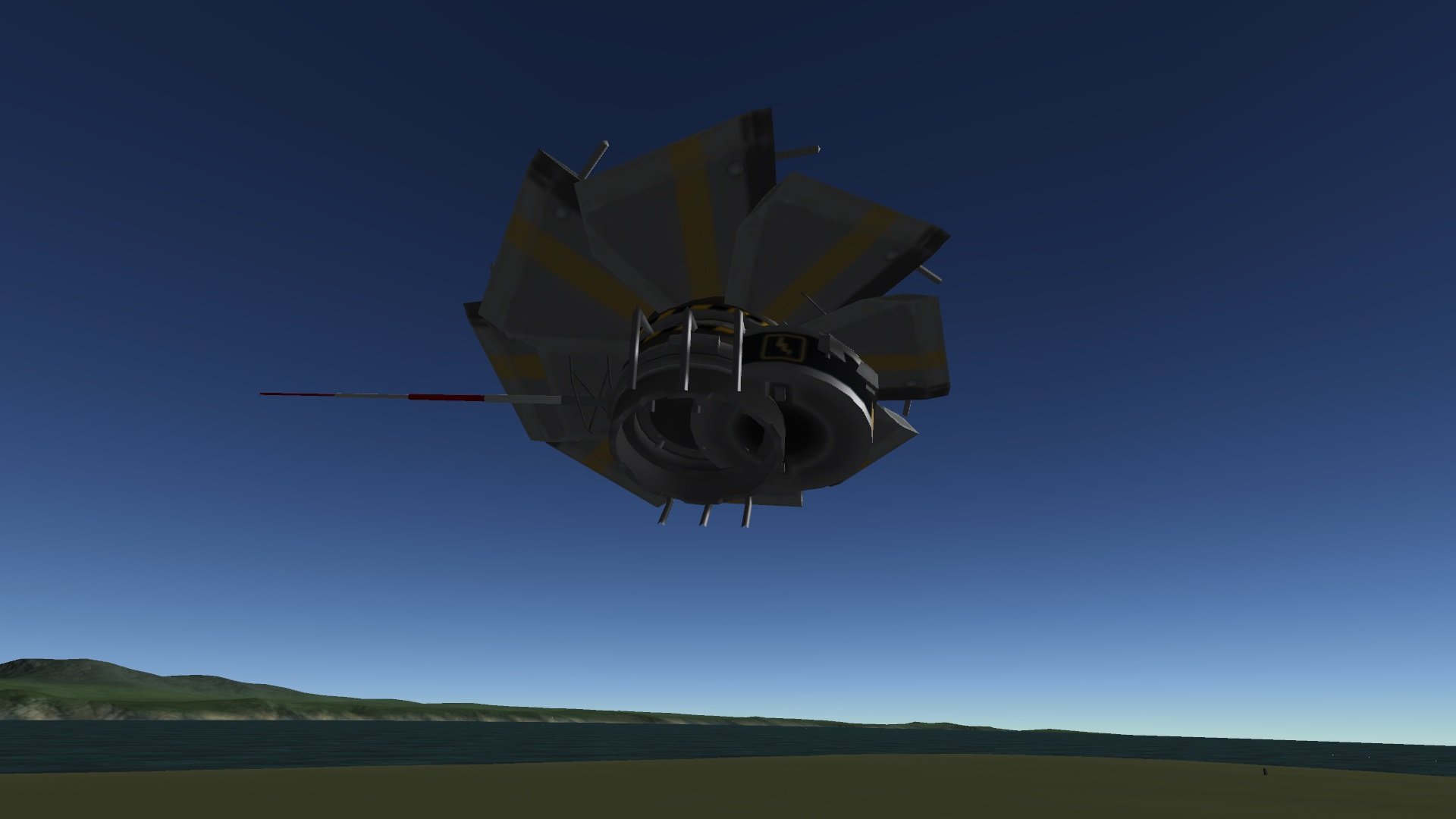
Bay Стрекоза - Вертобот. В своём исполнении служит лишь украшением окружающего мира, так как бот практически неуправляем. Можно запустить их в большом количестве и наблюдать как они кружат вокруг места запуска. К тому же не обошлось без маленького косяка на видео. Как-то не обратил внимания, на то, что действия со второй поляной происходят на высоте 6000м. Атмосфера там весьма разряжена и вертоботы отказались летать. Пришлось заменить их другими, с клиппованными лопастями (по 4 штуки). Тогда они полетели. Не знаю, как насчёт украшения, но думаю, что подобный подшипник ещё проявит себя в чьих ни будь крафтах и с крыльчаткой, и без. Кстати на Танке были установлены именно они, в качестве шарнира для пулемёта.
Bay Рачки - 2 трёхколёсных ровера. Скорость 8,2 м/с. Собственно больше добавить нечего, кроме как то, что они залезли в консервную банку вдвоём.
Нетто Брутто Масса 0.225х2 0.580 Кол-во дет. 11х2 25
Маленький нюанс. Где-то между 1.2.2 и 1.4.3 произошло массовое изменение стоковых деталей. В частности, “бублик”, который использовался для большинства осей в этом выпуске. Не уверен, как оно будет работать в последней версии игры (погоня за ними, нынче для меня роскошь), но в 1.4.3, при загрузке крафтов, загружаются те самые старые детали. В 1.4.3 была попытка собрать новый двуногий шагоход, на другом принципе и массой менее 2т. Почти получилось, но оси получились слишком нестабильны, и я пока на это дело махнул (в этом выпуске хватит). Но пару-тройку десятков метров он все-таки преодолел, набрав и удерживая скорость 4,6 м/с.

































 Shurnir
Shurnir