
Название: Ровер Механик "BOX-38.1"
Представляю Вашему вниманию новый прототип из адской робототехники "BOX-38.1"
Данный ровер создан по конструктивной линии семейства BOX "Коробка" авторства Kermaniac, а также автором крафта BOX-3
Описание: Изначально "BOX-38.1" имеет форму не большого контейнера. После трансформации у вас ровер с множеством функций, где можно отдельно выделить систему мобильного крана. Ровер показал себя с отличной стороны в работе на планете Dune. В принципе он был создан в момент колонизации данной планеты (с низкой гравитации) и поэтому ровер не был подвержен дополнительному армированию и сварке.
"BOX-38.1" оснащен колесной базой в количестве 4-х пар (8 колес), где 2 пары колес основные и 2 пары вспомогательные. Над основными парами расположены блоки маневровых двигателей.
В передней части ровера установлена лебёдка и место водителя. Здесь компактно размещены комплекты аккумуляторов, генераторы в количестве трех штук, антенна и различные измерительные (стоковые) приборы.
Средняя часть ровера оснащена четырьмя опорами, модулем SAS, беспилотной системой (малого радиуса действия!) Я советую установить командную систему Probodobodune Mast Cam - это система обеспечивает управление беспилотных вездеходов на больших расстояниях. Здесь размещена башня крана с рабочим местом для Кербонавта. С "верху крана", на защитных панелях установлены две солнечные батареи XL. На манипуляторах установлены две (стоковые) камеры, которые я рекомендую заменить на камеры Lazor (картинка в картинке), для удобства проводимых работ.
В задней части расположены три контейнера (два класса "А" и один класса "Б"), укомплектовать самостоятельно! Тут же расположена подвижная "переходная площадка" , для прохода Кербонавта с средней части.
Характеристики Ровер Механик "BOX-38.1"
Согласно данным из TAC Part Lister:
-Parts 397;
-Mass 19.333;
-Cost 159.630;
-Electric 2810;
Рекомендуемая скорость по Dune до 10 мет/сек., не забываем про функциональную принадлежность ровера (это не спорт-болид! Не рекомендую использовать ровер на планетах с большой гравитацией!)
Максимальный подъёмный вес в настоящее время не установлен. С легкостью приподнимает и ставит "на место" исследовательский корабль средних размеров.
Длину, количество "звеньев" манипулятора каждый самостоятельно может настроить под себя (под свой вид работ). Незабываем про опрокидывание! (т.е. чем больше вылет, тем больше нагрузки на центральную опору крана и соответственно уменьшение подъемной силы)
Управление ровером:
1.-Разложить Ровер (центр/вправо )
2.-Увеличить базу Ровера (налево/центр)
3.-Разложить перед Ровера (центр/вправо )
4.-Выставить колеса (налево/центр)
5.-Сложить перед Ровера (налево/центр)
6.-Подъем башни Ровера (налево/центр)
7.-Выставить опоры (центр/вправо )
8.-Поворот башни (налево/центр/вправо)
9.-Кран 2зв (налево/центр/вправо )
10-Кран 3зв (налево/центр/вправо )
11-Кран 4зв (налево/центр/вправо )
12-Кран 5зв (налево/центр/вправо )
13-Кран 6зв (налево/центр/вправо )
14-Кран крюк (налево/центр/вправо )
15-Антенна (налево/центр)
16-Лебёдка (налево/центр)
17-Задние колеса (налево/центр)
18-Откинуть контейнер (налево/центр)
19-О пуск контейнера (налево/центр)
20-Переходная площадка (налево/центр)
Где числа 1,2,3-20 обозначают порядковый номер позиции и пропись в Servo Control.
Хочу сразу предупредить!, что даже при полной прописке Servo Control, KSP "умудряется раскидывать команды по своему усмотрению". С чем это связано мне неизвестно, я прописывал все сразу (кучу-малу не нагребал).
Небольшая шпаргалка для начинающих Кербонавтов:
Используйте мод ANVIL ROCKETS GUIDE v1.8 Эти малышки спокойно поднимают (доставляют) груз с весом до 36 тонн., Инструкция
При создании ровера были использованы (можно скачать сразу) моды:
-KAS архив.rar вес 6,6 МБ
-MagicSmokeIndustries архив.rar вес 17,4 МБ
-nothke_DROMOMAN архив.rar вес 737 КБ
-RollKage 1.1 архив.rar вес 3,4 МБ
-Wheel архив.rar вес 6,3 МБ
Распакуйте архив и поместите в папку GameData!
Скачать видео Ровер-Механик BOX-38.1 вес 546 МБ
Доработанный BOX, в виде "BOX-38.11"
В BOX-38.11 были внесены изменения: в системе крана (более функциональное расположение манипуляторов)., смена крюка на лебёдку., не значительная переделка противовеса крана., также ровер "потерял" один контейнер класса "А" (который находился на "палубе")., ну и для простоты использования ровера - в Servo Configuration чуть обновились команды.
В Servo Configuration прописаны знаки (вправо).,
где налево и вправо означают действие (трансформацию)., и центр вернутся на исходную позицию.
Рекомендуемая последовательность команд:
Разложить Ровер (центр/вправо)
Увеличить длину Ровера (налево/центр)
Откинуть перед Ровера (центр/вправо)
Выставить колеса спереди (налево/центр)
Сложить перед вдвое (налево/центр)
Подъем башни Крана (налево/центр)
Выставить опоры "с начало подними башню!" (0/>)
Поворот башни Крана "выстави 0.1" (налево/центр/вправо) для плавного поворота башни!
Кран 1зв вращение (налево/центр/вправо)
Кран 2зв сгиб (налево/центр/вправо)
Кран 3зв сгиб (налево/центр/вправо)
Кран 4зв сгиб (налево/центр/вправо)
Кран 5зв вращение (налево/центр/вправо)
Кран 5зв сгиб (налево/центр/вправо)
Антенна Ровера (налево/центр)
Лебёдка спереди (налево/центр)
Выставить задние колеса (налево/центр)
Откинуть контейнер (налево/центр)
О пуск контейнера (налево/центр)
Переходная площадка (налево/центр)
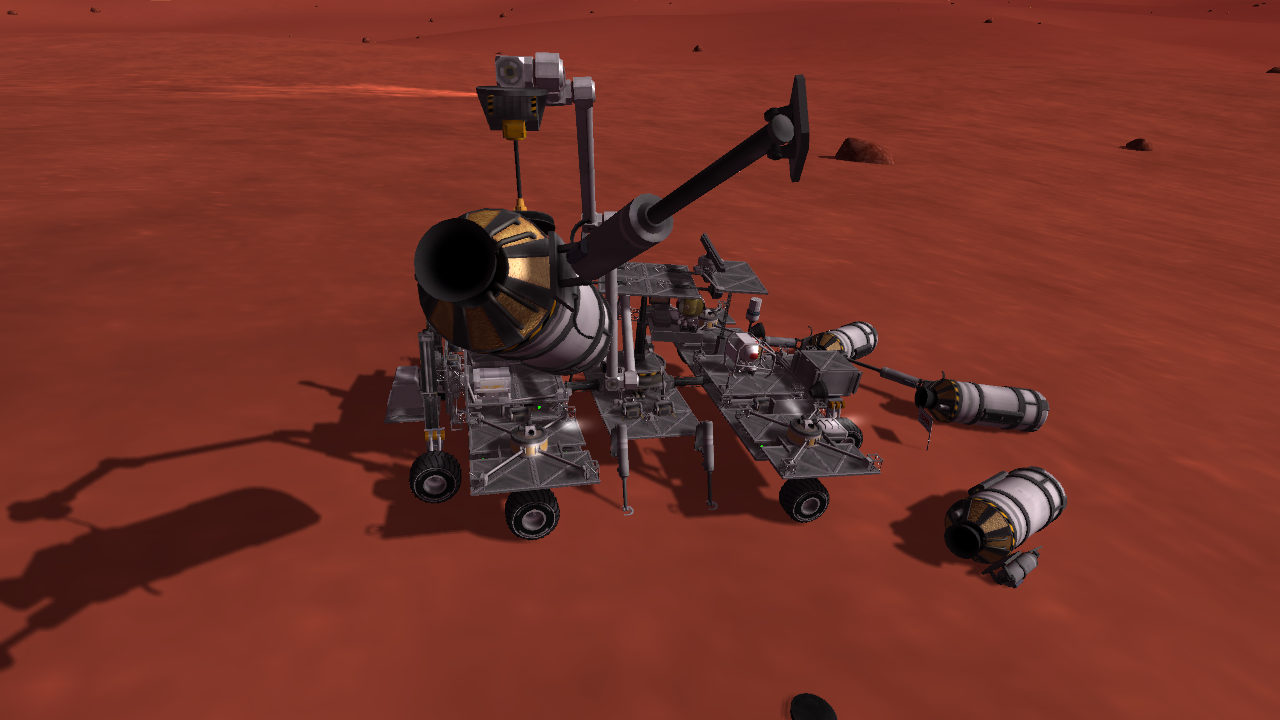
Фото трудовых будней с участием "BOX-38.11"
Ровер был отправлен с Базы (Dune-base_2) на место катастрофы челнока Ft78, где ему пришлось разгребать завал. На снимке видно как ровер поднял "вспомогательный ракетный блок" весом в 3.650 кг. (Бак FL-F400/Бак FL-T100/Парашют Mk25/Опора LT-2/двигатель LV-909) Работы были усложнены неровной поверхностью (в 17/спуск). На склонах и при большом весе советую включать маневровые двигатели!, тем самым уменьшите процент опрокидывания ровера. Пострадавших НЕТ!


продолжение следует ...
Причина: Исправление
-
 Nic Nout
Nic Nout - 20 фев 2014 в 17:09
- 8 360
- 33

Ровер с вертикальным взлетом(финальная версия)
8 авг 2013 в 03:14,
Ровер S-класса для Джеба
31 июл 2013 в 16:08,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии


Последние сообщения с форума



Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt