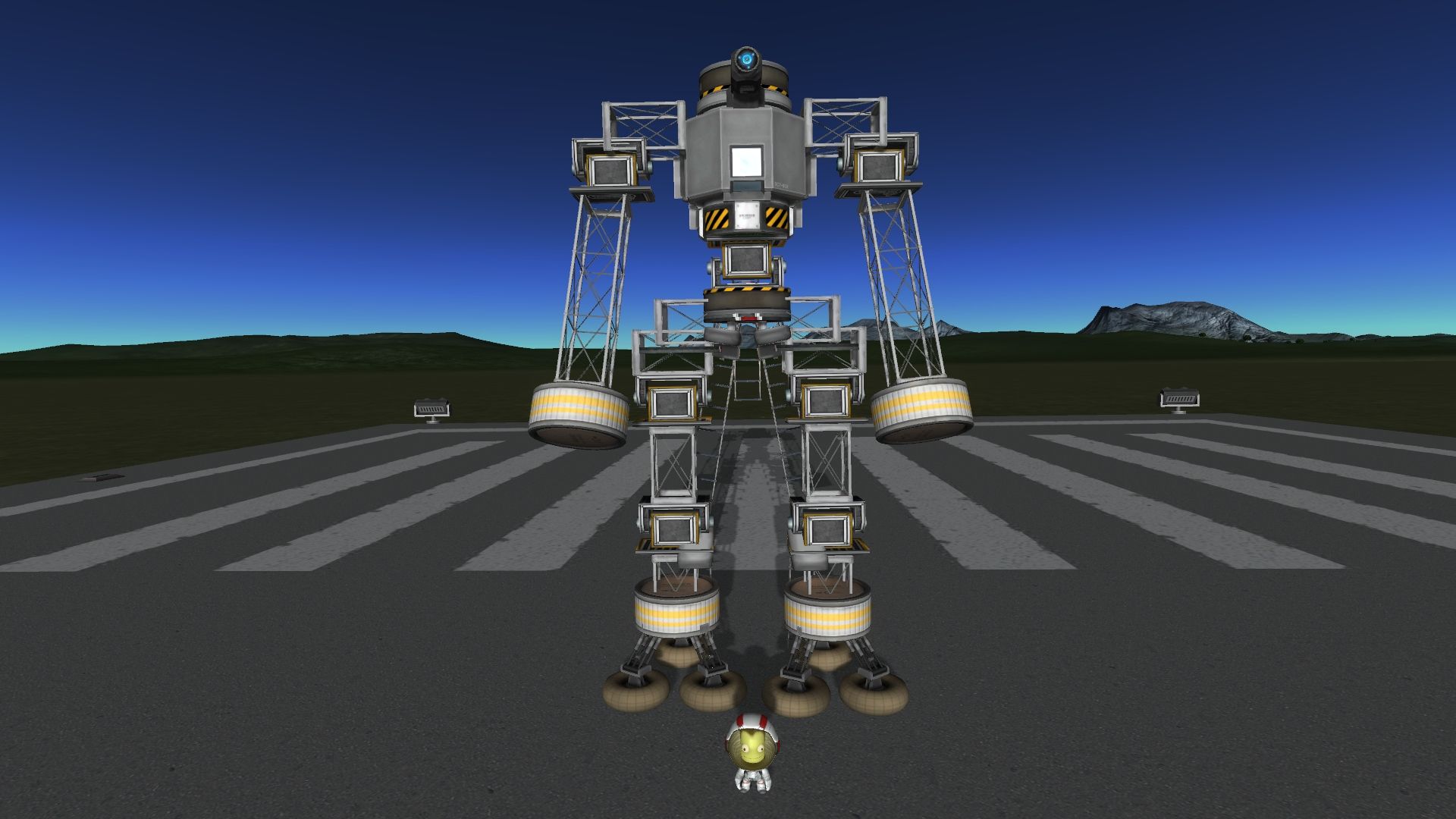
Представляю вам мою первую более-менее удачную попытку собрать двуногого робота.
Конструкция довольно типична. Никаких наворотов типа оружия на борту нет. По сути он может только идти вперёд (поворачивая за счёт САС).

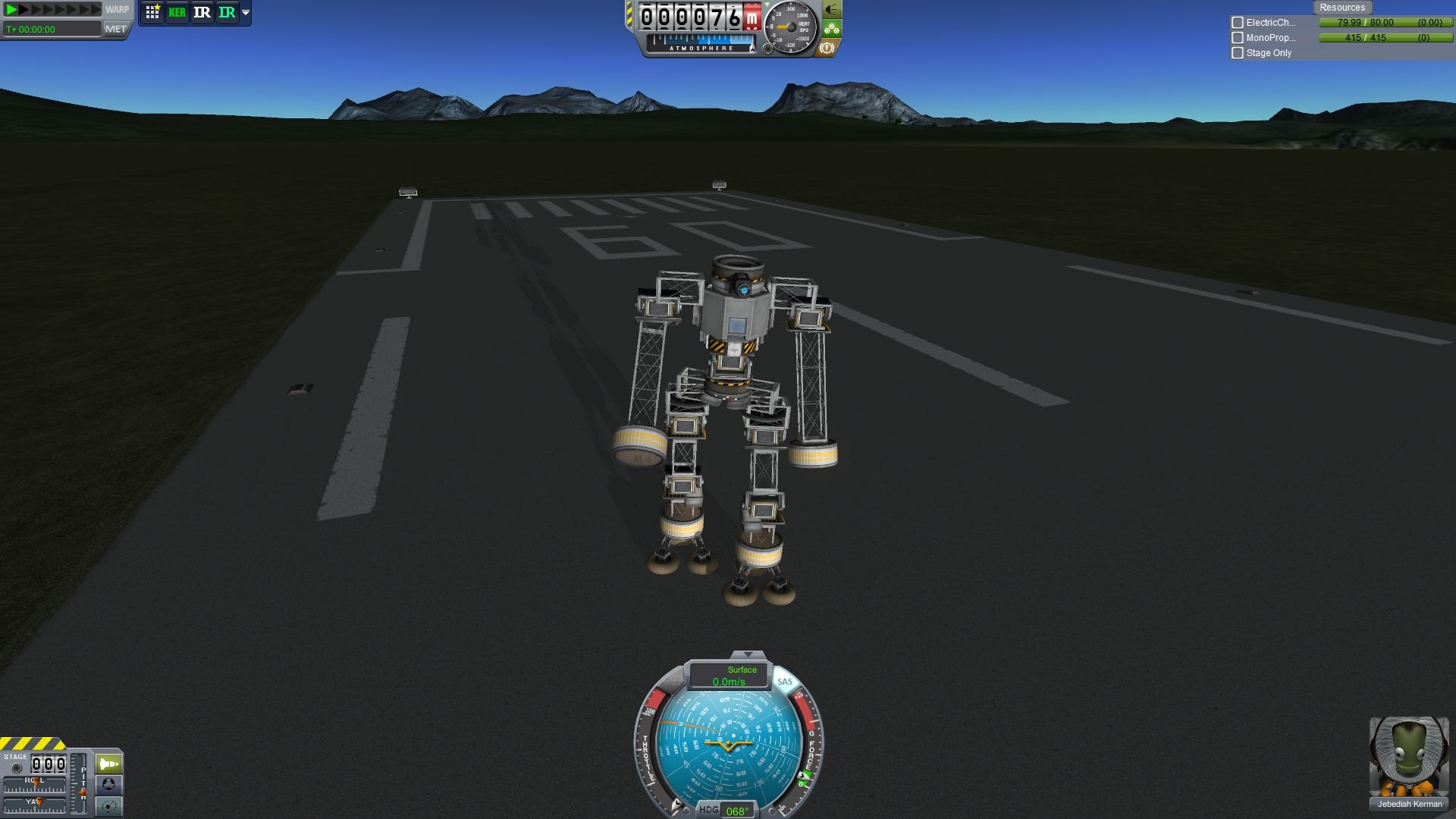
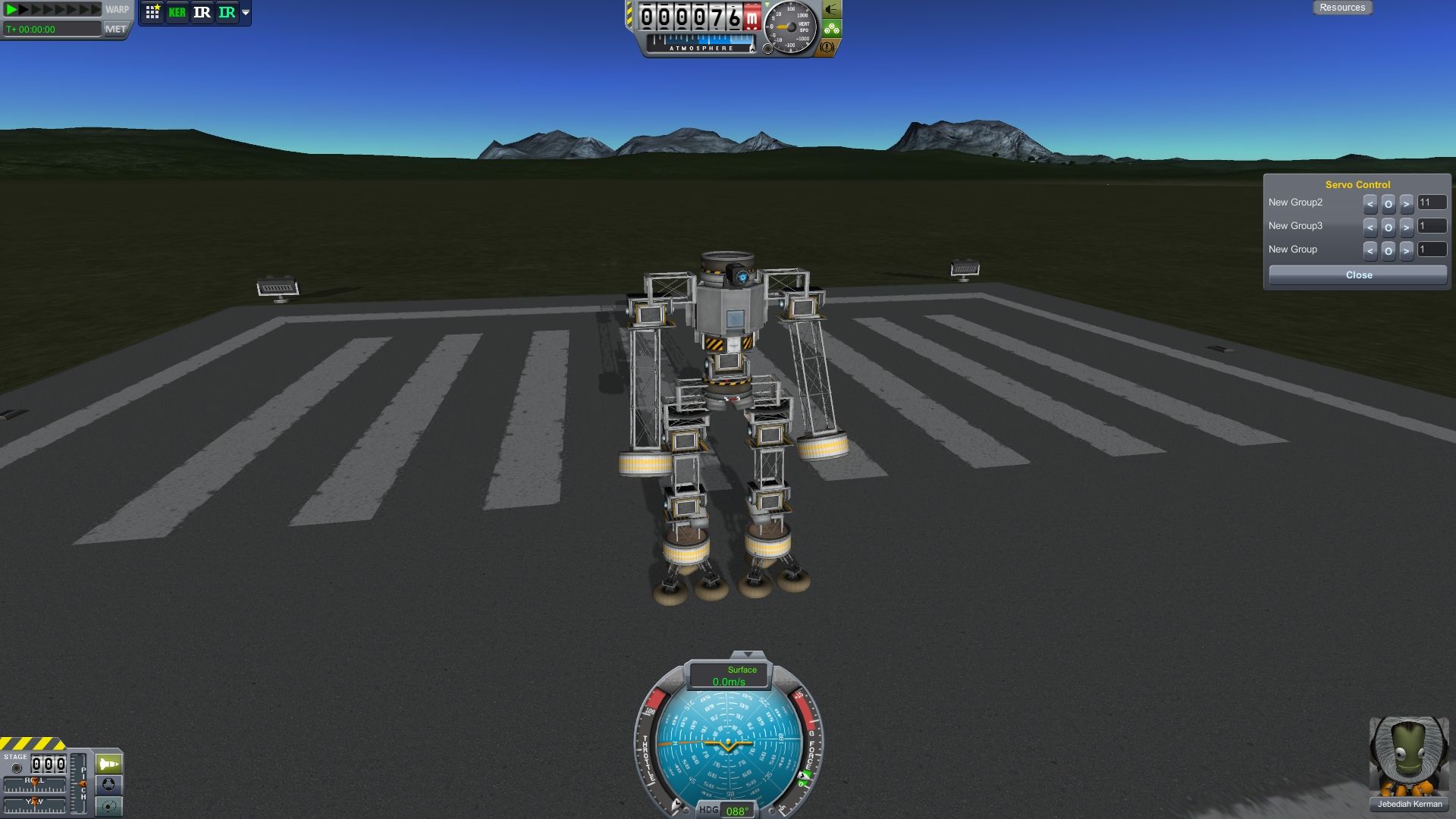
Управление: Включить САС. Выставить скорости групп как на скрине. Нажимая по очереди 1 и 2 передвигать ноги (в начале движения может понадобиться немного наклонить робота вперёд нажав W). Важно начинать следующее движение только когда робот обопрётся на вытянутую вперёд ногу. Повернуть можно нажимая Q-вправо, E-влево. Если произошло падение - надо привести ноги в начальное положение с помощью панели роботикса (группа без номера), нажать W или S (смотря в какую сторону всавать), нажать 6 (сработают поршни группы 2), и нажимая W или S ловить вертикальное положение.
 Кнопка 9 выдвигает лестницы на спине и ногах.
Кнопка 9 выдвигает лестницы на спине и ногах.Важно что собран робот на InfernalRobotics0.16.2, эта версия не совместима с предыдущими (у меня старые крафты не грузятся).
-
 GhostCG
GhostCG - 23 июн 2014 в 20:19
- 3 152
- 15

Mech Walker - Robot
8 янв 2016 в 16:33,
Гексапод
19 авг 2013 в 17:19,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
Kastronomicon, маяк Кербина
При всём уважении, в статье нет матана. Есть только элементарная математика.

ShineFix - мод для починки всех отражений и флагов в игре
В новой версии исправлено - теперь ресток тоже полностью поддерживается)
ShineFix - мод для починки всех отражений и флагов в игре
Shaddy и Shabby это два разных мода, ссылки в посте ведут на репозитории авторов, что априори самое
ShineFix - мод для починки всех отражений и флагов в игре
Я добавил в подпись актуальную версию, она будет обновляться автоматически, как и ссылка на неё)
Ы-4. Однокнопочное чудо для FAR
Да, конечно. Мод на поддержке)

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума



Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt