Ходить по планетам пешком можно, но скучно. Гораздо лучше взять с собой ровер. Еще лучше его не оставлять, а взять с собой на следующую планету.

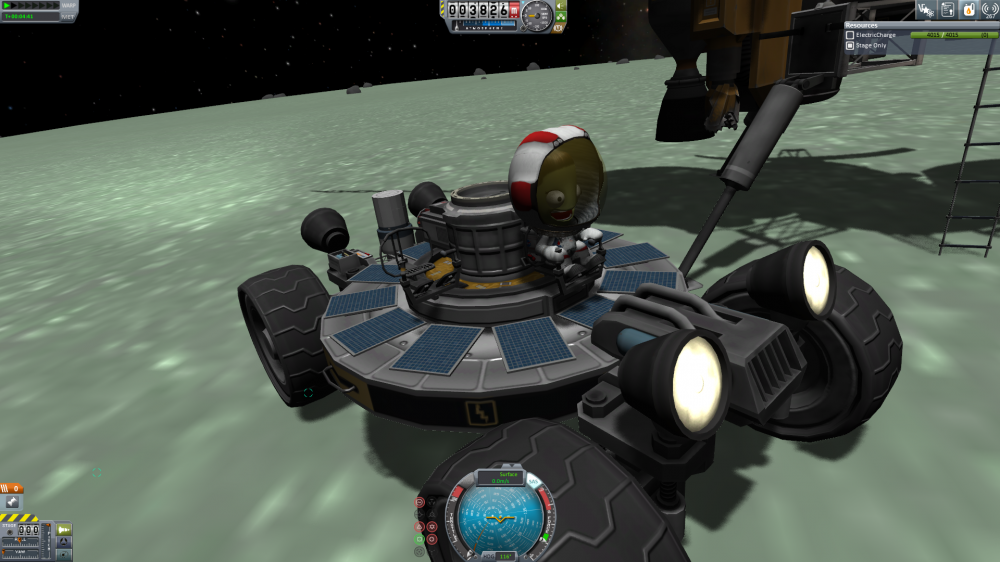
Ровер. Главная часть корабля. Остальное строилось для его перемещения с планеты на планету.
45 частей
масса пустого 1.19т
топливо+окислитель 0.2т
полная масса 1.39т
стоимость 86752
Конструкция.
База: большая батарея Z-4K, к ней на маленьких кубиках подвешены колеса, в подвеску вмонтированы ритэги. Спереди анализатор атмосферы изображает решетку радиатора. Сзади остальные научные приборы и антенна. Сверху модуль управления RC-001S, на нем три посадочных места и топливный бак Oscar-B с маленьким стыковочным узлом, которым ровер подвешивается к кораблю. Солнечные батареи оставлены от предыдущих модификаций ровера (пока не было ритэгов) исключительно для красоты, два ритэга и батарея на 4к обеспечивают полную мощность на четырех колесах ~50 минут. Снизу маленький стабилизатор и двигатель 48-7S. После посадки ровер отстыковывается и с небольшой высоты падает на землю. Экипаж выходит из корабля, забирается в ровер, катается по окрестностям. Для пристыковки обратно нужно заехать точно под корабль и чуть подлететь на двигателе (экипаж уже должен сидеть в корабле, в креслах они будут мешать). При слабой гравитации ровер может притянуть одними магнитами стыковочных узлов, без двигателя. Теоретически на нем даже можно немного полетать (dV ~450м/с), главное не забыть оставить топливо для стыковки с кораблем.

Управление.
SAS ставится в положение Radial, чтобы в случае чего ровер всегда разворачивало колесами вниз. Встроенный стабилизатор модуля управления мощностью 0.5 включен всегда, внешний мощностью 5 включается по ситуации (кнопка 1). При движении с горки, по инерции, при торможении включать. При управлении WSAD включение зависит от гравитации. На Минмусе надо выключать, на Кербине не надо, на Мохо зависит от характера местности. Если на каком-то маневре или стыке полигонов местности ровер на приличной скорости подкинуло с неуправляемым вращением, WSAD отпустить, включить стабилизатор, ровер развернет колесами вниз и клавишами Q-E развернуть его по направлению полета. Если всё сделать быстро, ровер аккуратно приземлится на колеса и поедет дальше. Так же поступать при любых намеках на потерю управления: включать стабилизатор и подруливать Q-E (A-D вызывают крен). Важно: когда экипаж садится в ровер, управление переключается на кресло. Нужно переключить обратно на модуль управления, чтобы правильно работал Radial. С горки можно уверенно разгоняться до 30-40 м/с, а если с прыжка упадем в яму и всё же сломаем колеса, у нас есть инженер :)
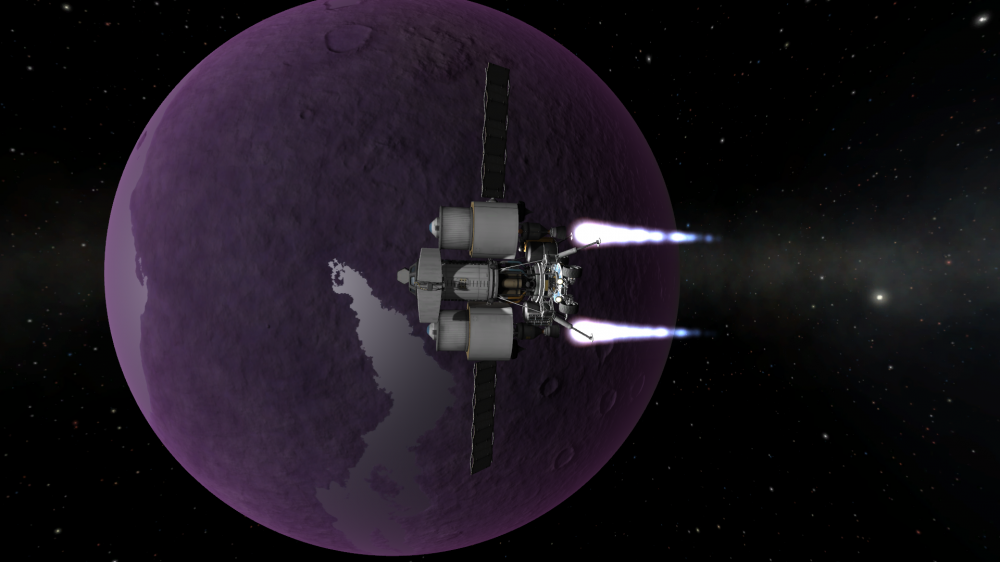
Корабль (с ровером)
96 частей
масса пустого 29.74т,
25т топлива для LV-N, 16т топлива с окислителем для T-1, 6т руды (скорее всего для LV-N, но мало-ли на что понадобится)
полная масса 76.74т,
стоимость 310612
Вместе с ракетой-носителем: 112 частей, 451.3т., стоимость 493080

Конструкция
Центральный блок (купол, лаборатория, конвертер, батарея) имеет снизу маленький стыковочный узел, к которому подвешивается ровер. В двух боковых блоках баки и двигатели: короткий Mk.3 для LV-N и X200-16 для T-1. Для охлаждения LV-N на бак поставлен средний раскладывающийся радиатор. Сверху большой парашют. При посадке на Кербин два парашюта тормозят почти пустой корабль (~30т) до ~16м/с, непосредственно перед посадкой скорость окончательно гасится коротким включением T-1. Два маленьких бака для руды. На один из них повешен бур, на второй батарея топливных элементов и шесть ритэгов. Солнечных батарей на корабле нет. С учетом двух ритэгов ровера мощности (8х0.75=6) достаточно для работы лаборатории (5). Топливная батарея включается для питания бура и конвертера. Полная мощность будет 6+18=24, бур потребляет 15, оставшихся 9 достаточно для 9/30=30% мощности работы конвертера, т.е. для переработки 30%*0.45=0.135 руды в секунду. Бур при плотности руды 8.6% (ещё найти надо) с инженером 4-го уровня выдает ~0.1 руды в секунду, т.е. мощности достаточно для всего, корабль полностью энергонезависим от времени суток и расстояния от Солнца. Батарея потребляет 0.025 руды в секунду, для нормальной заправки надо садиться в районы с плотностью руды 3% и больше. Полный набор сканеров руды на это имеется. Полная заправка занимает несколько дней. Конвертер включается сразу в два режима: Lf+Ox и LqdFuel. Так баки с непропорциональным количеством топлива и окислителя заполнятся без какого-либо дополнительного вмешательства. Пока не заполнены баки с окислителем, вся мощность конвертера будет уходить на первый режим, на втором будет «missing ore». Потом на первом режиме останется мощность только для восполнения затрат на топливную батарею, к примеру 5% Lf+Ox, 15% LqdFuel (соотношение зависит от концентрации руды). В крайнем случае (вынужденная посадка в бедном рудой районе) можно заправляться с выключенной батареей, на одних ритэгах, но это будет долго.

Испытательный полет
dV зависит от порядка включения двигателей. От ~ 6380 м/c (сначала T-1 до сжигания окислителя, затем LV-N, руда переводится в топливо) до ~5500 м/с (при обратном порядке). Практически (например, при полете на Мохо) получается нечто среднее (6k+), потому что нужно оставить окислитель для посадки (TWR на одних LV-N для Мохо маловат). Ракета-носитель (соединенные два блока с KS-25 на первой ступени и KR-2L+ на второй с баками S3-14400) выводит корабль на орбиту ~300x0 (чтобы мусора не осталось), на низкую орбиту корабль выходит сам. Далее летим к Минмусу. Садимся, заправляемся, взлетаем на низкую орбиту Минмуса. Ждем момента, когда Кербин будет вблизи точки пересечения с орбитой Мохо. Вылетаем с Минмуса на вытянутую эллиптическую орбиту Кебина. Наклонение заранее выбираем такое, чтобы после выхода на околосолнечную орбиту наклонение к орбите Мохо было минимальным. Все это мы выполняем на LV-N. T-1 включаем для быстрого выполнения гравитационного маневра у Кербина. После выхода на переходную орбиту осталось 545 окислителя. Все дальнейшие маневры до посадки на Мохо выполнялись на LV-N. T-1 включились непосредственно перед посадкой. Сели почти пустые. Перелет был неоптимальный (Наклонение полностью не убралось, Мохо в апоцентре, перицентра ждать было лень). Итог испытаний: при уровне планирования «примерно тогда, примерно туда» корабль до Мохо долетает. Значит, долетит куда угодно.
Что дальше? Дальше Валентина с командой отправились записывать в послужной список посещение Джилли :)
А Джеб, Билл и Боб испытывают новый Cruise Ship Mk.8
Управление:
1. Переключение стабилизатора ровера
2. Переключения дисплеев на приборах
3. Выполнение измерений на приборах
4. Развертывание/свертывание бура, выключение топливной батареи
5. Включение бура, включение топливной батареи
6. Развертывание/свертывание радиаторов
7. Переключение 48-7S
8. Переключение T-1
9. Переключение LV-N
10. Развертывание/свертывание лестниц
Известный баг: конвертер может заполнять баки неравномерно, при переработке руды в полете лучше отключать все баки кроме тех, которые планируем заполнить.
Ровер. Главная часть корабля. Остальное строилось для его перемещения с планеты на планету.
45 частей
масса пустого 1.19т
топливо+окислитель 0.2т
полная масса 1.39т
стоимость 86752
Конструкция.
База: большая батарея Z-4K, к ней на маленьких кубиках подвешены колеса, в подвеску вмонтированы ритэги. Спереди анализатор атмосферы изображает решетку радиатора. Сзади остальные научные приборы и антенна. Сверху модуль управления RC-001S, на нем три посадочных места и топливный бак Oscar-B с маленьким стыковочным узлом, которым ровер подвешивается к кораблю. Солнечные батареи оставлены от предыдущих модификаций ровера (пока не было ритэгов) исключительно для красоты, два ритэга и батарея на 4к обеспечивают полную мощность на четырех колесах ~50 минут. Снизу маленький стабилизатор и двигатель 48-7S. После посадки ровер отстыковывается и с небольшой высоты падает на землю. Экипаж выходит из корабля, забирается в ровер, катается по окрестностям. Для пристыковки обратно нужно заехать точно под корабль и чуть подлететь на двигателе (экипаж уже должен сидеть в корабле, в креслах они будут мешать). При слабой гравитации ровер может притянуть одними магнитами стыковочных узлов, без двигателя. Теоретически на нем даже можно немного полетать (dV ~450м/с), главное не забыть оставить топливо для стыковки с кораблем.
Управление.
SAS ставится в положение Radial, чтобы в случае чего ровер всегда разворачивало колесами вниз. Встроенный стабилизатор модуля управления мощностью 0.5 включен всегда, внешний мощностью 5 включается по ситуации (кнопка 1). При движении с горки, по инерции, при торможении включать. При управлении WSAD включение зависит от гравитации. На Минмусе надо выключать, на Кербине не надо, на Мохо зависит от характера местности. Если на каком-то маневре или стыке полигонов местности ровер на приличной скорости подкинуло с неуправляемым вращением, WSAD отпустить, включить стабилизатор, ровер развернет колесами вниз и клавишами Q-E развернуть его по направлению полета. Если всё сделать быстро, ровер аккуратно приземлится на колеса и поедет дальше. Так же поступать при любых намеках на потерю управления: включать стабилизатор и подруливать Q-E (A-D вызывают крен). Важно: когда экипаж садится в ровер, управление переключается на кресло. Нужно переключить обратно на модуль управления, чтобы правильно работал Radial. С горки можно уверенно разгоняться до 30-40 м/с, а если с прыжка упадем в яму и всё же сломаем колеса, у нас есть инженер :)
Корабль (с ровером)
96 частей
масса пустого 29.74т,
25т топлива для LV-N, 16т топлива с окислителем для T-1, 6т руды (скорее всего для LV-N, но мало-ли на что понадобится)
полная масса 76.74т,
стоимость 310612
Вместе с ракетой-носителем: 112 частей, 451.3т., стоимость 493080
Конструкция
Центральный блок (купол, лаборатория, конвертер, батарея) имеет снизу маленький стыковочный узел, к которому подвешивается ровер. В двух боковых блоках баки и двигатели: короткий Mk.3 для LV-N и X200-16 для T-1. Для охлаждения LV-N на бак поставлен средний раскладывающийся радиатор. Сверху большой парашют. При посадке на Кербин два парашюта тормозят почти пустой корабль (~30т) до ~16м/с, непосредственно перед посадкой скорость окончательно гасится коротким включением T-1. Два маленьких бака для руды. На один из них повешен бур, на второй батарея топливных элементов и шесть ритэгов. Солнечных батарей на корабле нет. С учетом двух ритэгов ровера мощности (8х0.75=6) достаточно для работы лаборатории (5). Топливная батарея включается для питания бура и конвертера. Полная мощность будет 6+18=24, бур потребляет 15, оставшихся 9 достаточно для 9/30=30% мощности работы конвертера, т.е. для переработки 30%*0.45=0.135 руды в секунду. Бур при плотности руды 8.6% (ещё найти надо) с инженером 4-го уровня выдает ~0.1 руды в секунду, т.е. мощности достаточно для всего, корабль полностью энергонезависим от времени суток и расстояния от Солнца. Батарея потребляет 0.025 руды в секунду, для нормальной заправки надо садиться в районы с плотностью руды 3% и больше. Полный набор сканеров руды на это имеется. Полная заправка занимает несколько дней. Конвертер включается сразу в два режима: Lf+Ox и LqdFuel. Так баки с непропорциональным количеством топлива и окислителя заполнятся без какого-либо дополнительного вмешательства. Пока не заполнены баки с окислителем, вся мощность конвертера будет уходить на первый режим, на втором будет «missing ore». Потом на первом режиме останется мощность только для восполнения затрат на топливную батарею, к примеру 5% Lf+Ox, 15% LqdFuel (соотношение зависит от концентрации руды). В крайнем случае (вынужденная посадка в бедном рудой районе) можно заправляться с выключенной батареей, на одних ритэгах, но это будет долго.
Испытательный полет
dV зависит от порядка включения двигателей. От ~ 6380 м/c (сначала T-1 до сжигания окислителя, затем LV-N, руда переводится в топливо) до ~5500 м/с (при обратном порядке). Практически (например, при полете на Мохо) получается нечто среднее (6k+), потому что нужно оставить окислитель для посадки (TWR на одних LV-N для Мохо маловат). Ракета-носитель (соединенные два блока с KS-25 на первой ступени и KR-2L+ на второй с баками S3-14400) выводит корабль на орбиту ~300x0 (чтобы мусора не осталось), на низкую орбиту корабль выходит сам. Далее летим к Минмусу. Садимся, заправляемся, взлетаем на низкую орбиту Минмуса. Ждем момента, когда Кербин будет вблизи точки пересечения с орбитой Мохо. Вылетаем с Минмуса на вытянутую эллиптическую орбиту Кебина. Наклонение заранее выбираем такое, чтобы после выхода на околосолнечную орбиту наклонение к орбите Мохо было минимальным. Все это мы выполняем на LV-N. T-1 включаем для быстрого выполнения гравитационного маневра у Кербина. После выхода на переходную орбиту осталось 545 окислителя. Все дальнейшие маневры до посадки на Мохо выполнялись на LV-N. T-1 включились непосредственно перед посадкой. Сели почти пустые. Перелет был неоптимальный (Наклонение полностью не убралось, Мохо в апоцентре, перицентра ждать было лень). Итог испытаний: при уровне планирования «примерно тогда, примерно туда» корабль до Мохо долетает. Значит, долетит куда угодно.
Что дальше? Дальше Валентина с командой отправились записывать в послужной список посещение Джилли :)
А Джеб, Билл и Боб испытывают новый Cruise Ship Mk.8
Управление:
1. Переключение стабилизатора ровера
2. Переключения дисплеев на приборах
3. Выполнение измерений на приборах
4. Развертывание/свертывание бура, выключение топливной батареи
5. Включение бура, включение топливной батареи
6. Развертывание/свертывание радиаторов
7. Переключение 48-7S
8. Переключение T-1
9. Переключение LV-N
10. Развертывание/свертывание лестниц
Известный баг: конвертер может заполнять баки неравномерно, при переработке руды в полете лучше отключать все баки кроме тех, которые планируем заполнить.
-
 Marschig
Marschig - 9 ноя 2015 в 21:56
- 8 687
- 22

Cruise Plane Mk3 - космоплан с лабораторией и ровером
29 апр 2016 в 03:10,
Cruise Ship Mk.8: Возьми с собой ровер на Тило и Лейт!
22 ноя 2015 в 03:35,Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
Как сделать облака и на других планетах по типу Евы или джула. И как сделать так чтобы на дюне были
Kerbal Space Program (KSP) 1.12.5 скачать - "On Final Approach" + DLC
тут хотя бы не троян?
[РУСИФИКАТОР] KSP 1.0.x
Спасибо огромное на финальной версий 1.12.5 всё переведено идеально
Параллельный импорт EVE Raymarched Volumetrics - RSS "Облака планеты Земля"
я видеокарта gtx660 мод потянет?

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума


Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt