kOS-скрипт посадочного автопилота
Добрых шестичасовых суток!
Теперь от теории к практике.
P. S. Подводные камни.
Как всегда, не все так прекрасно, как очень хочется. Нельзя просто так запустить скрипт на любом аппарате, удобном для посадки на Кербине, или еще где. Необходимо учесть два параметра, разных для каждого аппарата.
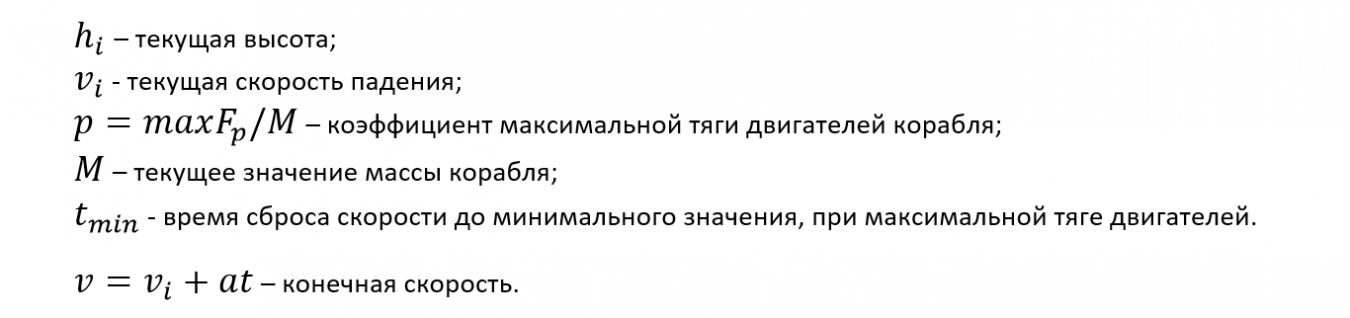
1. Измерение высоты полета над поверхностью не учитывают высоту самого крафта, в следствии чего расчетная финальная высота в реальности оказывается ниже уровня земли, и мы получаем не очень мягкую посадку.
2. Инертность работы скрипта ведет к зависанию аппаратов с двигателями с большим TWR над поверхностью земли, т.к. импульсы тяги больше, чем нужно, и скрипт вылетает из-за потери ретрогрейда.
Если в решении второй проблемы я ввел в скрипт программный лимит тяги (эмпирически выведен лимит в TWR=2), то для решения первой приходится вводить данные о высоте крафта в скрипт, а точнее высоту расположения командного модуля относительно самой нижней точки крафта.
Пока все. Спасибо за внимание.
Хочу представить вам свои наработки по созданию автоматического пилотирования на основе скриптов kOS. Сегодня речь пойдет об автоматической посадке на Кербин …постойте! – скажут некоторые – во-первых, в чем сложности посадки на Кербин?! – есть же парашюты; а во-вторых, есть MechJeb. Правильно, ни то и ни другое не мешает нам расслабиться и наслаждаться жизнью, т.е. полетом. Но мы были бы не мы, если бы не ставили перед собой дополнительных задач, которые помогают нам смотреть шире на обыденные для нас вещи.
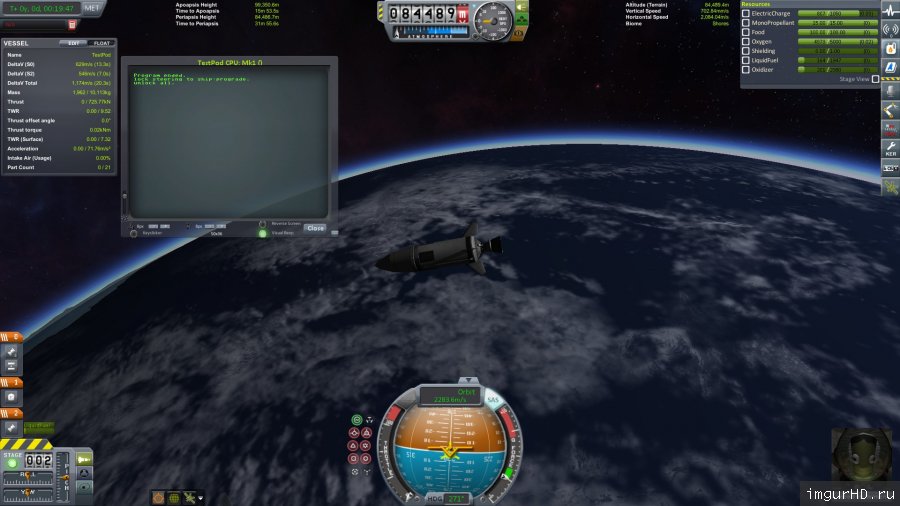
Итак, автоматическая посадка на Кербин без парашютов и MechJeb’а, имея в наличии всего лишь kOS-процессор на борту и скрипт посадки “landing.ks”.
Итак, автоматическая посадка на Кербин без парашютов и MechJeb’а, имея в наличии всего лишь kOS-процессор на борту и скрипт посадки “landing.ks”.






Теперь от теории к практике.











P. S. Подводные камни.
Как всегда, не все так прекрасно, как очень хочется. Нельзя просто так запустить скрипт на любом аппарате, удобном для посадки на Кербине, или еще где. Необходимо учесть два параметра, разных для каждого аппарата.
1. Измерение высоты полета над поверхностью не учитывают высоту самого крафта, в следствии чего расчетная финальная высота в реальности оказывается ниже уровня земли, и мы получаем не очень мягкую посадку.
2. Инертность работы скрипта ведет к зависанию аппаратов с двигателями с большим TWR над поверхностью земли, т.к. импульсы тяги больше, чем нужно, и скрипт вылетает из-за потери ретрогрейда.
Если в решении второй проблемы я ввел в скрипт программный лимит тяги (эмпирически выведен лимит в TWR=2), то для решения первой приходится вводить данные о высоте крафта в скрипт, а точнее высоту расположения командного модуля относительно самой нижней точки крафта.
Пока все. Спасибо за внимание.
Скрипт landing.ks
-
 Iavasdemsul
Iavasdemsul - 23 сен 2016 в 00:20
- 17 099
- 21
![kOS-скрипты для вывода аппаратов [RSS-RO].](/templates/SD/dleimages/no_image.jpg)
kOS-скрипты для вывода аппаратов [RSS-RO].
19 июн 2016 в 23:38, Гайды
Tutorial: автопилот MechJeb 2.0.9
15 авг 2013 в 23:27, Творчество » ГайдыHello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии
Kastronomicon, маяк Кербина
При всём уважении, в статье нет матана. Есть только элементарная математика.

ShineFix - мод для починки всех отражений и флагов в игре
В новой версии исправлено - теперь ресток тоже полностью поддерживается)
ShineFix - мод для починки всех отражений и флагов в игре
Shaddy и Shabby это два разных мода, ссылки в посте ведут на репозитории авторов, что априори самое
ShineFix - мод для починки всех отражений и флагов в игре
Я добавил в подпись актуальную версию, она будет обновляться автоматически, как и ссылка на неё)
Ы-4. Однокнопочное чудо для FAR
Да, конечно. Мод на поддержке)

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума



Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt