Автоматическая экспедиция на Еву за наукой.
Скажу сразу, что карьеру я не проходил. Мне интересно придумывать что-то по-своему. Поэтому наверное много чего не знаю и не умею.
Миссия осуществлялась на чистом стоке versionFull = 1.3.1.1891 (WindowsPlayer x64) вообще безовсяких модов. Все расчеты делались на "бумажке" поэтому могут быть далеко не идеальными.
Миссия состоит в следующем. К Еве отправляются 3 аппарата:
1) возвращаемый на Кербин орбитальный зонд
2) ровер для сбора информации в биомах
3) спускаемый аппарат для передачи информации из ровера в орбитальный зонд
На поверхность сбрасывается ровер, который проезжая и пролетая в момент посадки над биомами собирает научную информацию. После сбора он стыкуется со спускаемым аппаратом и передает все данные ему. Спускаемый аппарат поднимается на орбиту и передает информацию орбитальному зонду который возвращает ее на Кербин.
В результате вышло 2 носителя:
1) для спускаемого аппарата
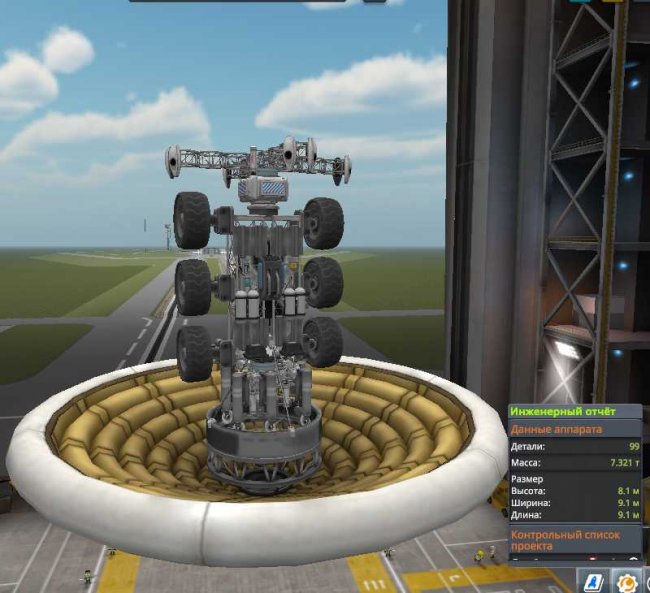
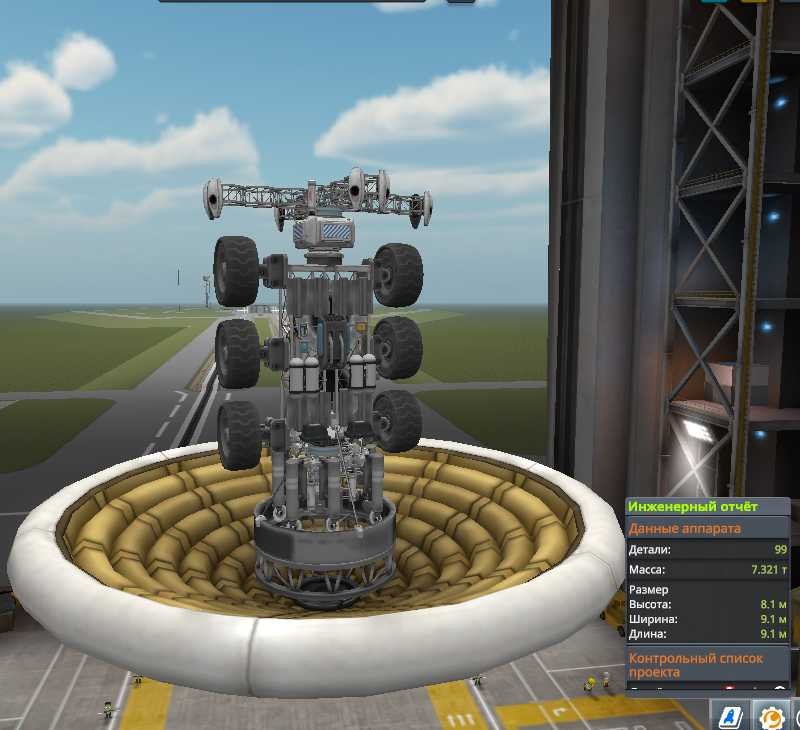
2) содержит трамвай из орбитального зонда и ровера
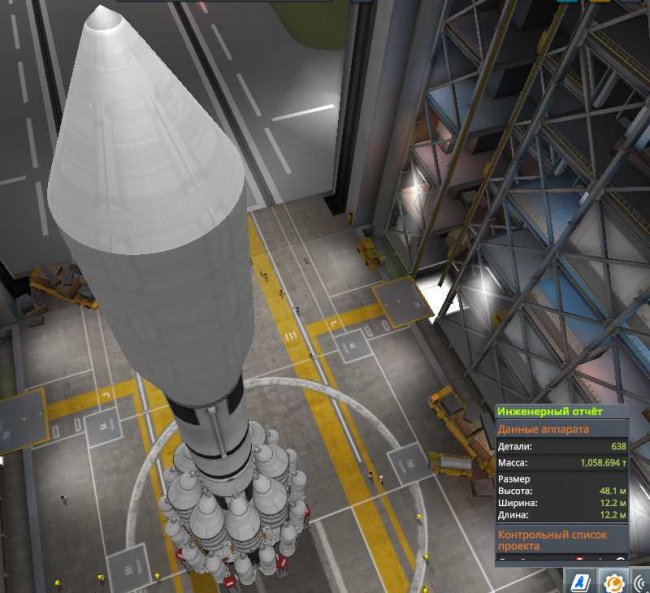
 Спускаемый аппарат хотелось сделать как-то нестандартно. Попробовал тороидальные баки. Оказалось что это
Спускаемый аппарат хотелось сделать как-то нестандартно. Попробовал тороидальные баки. Оказалось что это
довольно компактно и симпатично. Получилась этакая "ракета-пружинка". :)

 Ровер клипаный и некоторые вещи из него наверное можно выбросить. Это модернизация из предыдущих миссий к Дюне. В качестве источника энергии солнечные батареи не подошли. Мощности не хватает.
Ровер клипаный и некоторые вещи из него наверное можно выбросить. Это модернизация из предыдущих миссий к Дюне. В качестве источника энергии солнечные батареи не подошли. Мощности не хватает.

 Орбитальный зонд очень простой тут особенно и рассказывать не о чем.
Орбитальный зонд очень простой тут особенно и рассказывать не о чем.
Сама миссия.
1) На орбиту кербина последовательно отправляются спускаемый аппарат и трамвай.
2) С орбиты Кербира оба отправляются к Еве. Подлетные траектории нужно выбрать так чтобы аппараты прибыли с разницей во времени и посадкой на сушу.
3) На траектории к Еве трамвай расцепляется и производится коррекция траектории орбитального зонда с целями:
- орбитальный зонд должен иметь перицентр Евы около 40 км для правильного аэроторможения
- орбитальный зонд должен пибыть к Еве с разницей в несколько часов с ровером. Иначе ими трудно совместно управлять
4) Перед посадкой спускаемого аппарата надо не забыть свернуть солнечные панели.
5) Траектория посадки спускаемого аппарата должна быть довольно крутая иначе может сгореть. Аэротормоза используются для точного наведения при посадке. +/- чтобы не плюхнуться в озерцо. Надуваемый тормозной щит используется как парашют. :) Поэтому при посадке он выглядит как забавный "гриб". :) Раскрытие основных парашютов происходит одновременно с отстрелом тормозного щита на небольшой высоте (2-3 км). Отдельной регулировки потребо посадочные опоры иначе под весом в 94т они ломаются.
6) После посадки спускаемый аппарат разворачивает солнечные панели и ждет прибытия ровера в гибернации.
7) Расчитать точно параметры аэроторможения орбитального зонда довольно сложно. Пришлось несколько раз переигрывать. Может кто поделится опытом как это делать? После окончания активной фазы аэроторможения не забыть отделить тепловой щит! :)
8) Посадка ровера также осуществляется по довольно крутой траектории. Здесь тепловой щит используется по прямому назначению. РСУ необходимо для стабилизации при посадке. Двигатели РСУ выбраны мощные и вынесены на рычагах для увеличения стабилизирующего момента.
9) При посадне не забыть проворно собрать научную информацию с орбиты и верхних слоев атмосферы Евы. Все необходимо записать в модуль хранения.
9) Сброс тормозного щита осуществляется после раскрытия парашютов.
10) При посадке аппарат нужно повернуть так, чтобы ровер после посадки был наклонен колесами по склону
11) После посадки необходимо переключить управление на ровер включить САС и выбрать ориентацию (по-моему) "радиально наружу". После этого можно отстрелить модуль управления и посадочные опоры. Ровер должен брякнуться на колеса. Включить тормоза. Ровер готов ехать к спускаемому аппарату.
12) Я проехал по Еве на этом ровере примерно 1/4 экватора. Посетил 4 биома - пики, низменности, возвышенности, средиземье. На пики было очень трудно забираться. Энергии нехватало.
13) После стыковки со спускаемым аппаратом у ровера разлись колеса и сейчас он из себя представляет унылое зрелище, но тем не менее он полностю выполнил свою функцию.
 14) При взлете спускаемого аппарата от него отстреливается все лишнее. Тем не менее взлет довольно сложная процедура.
14) При взлете спускаемого аппарата от него отстреливается все лишнее. Тем не менее взлет довольно сложная процедура.
15) Стыковка на орбите спускаемого аппарата и орбитального зонда очень простая. В виду того что оба аппарата управляются двигатели ориентации не нужны.
16) После стыковки модуль хранения остается на орбитальном зонде, а остатки спускаемого аппарата отстреливаются.
16) Ждем на орбите окно для возвращения на Кербин и стартуем домой.
Миссия осуществлялась на чистом стоке versionFull = 1.3.1.1891 (WindowsPlayer x64) вообще безовсяких модов. Все расчеты делались на "бумажке" поэтому могут быть далеко не идеальными.
Миссия состоит в следующем. К Еве отправляются 3 аппарата:
1) возвращаемый на Кербин орбитальный зонд
2) ровер для сбора информации в биомах
3) спускаемый аппарат для передачи информации из ровера в орбитальный зонд
На поверхность сбрасывается ровер, который проезжая и пролетая в момент посадки над биомами собирает научную информацию. После сбора он стыкуется со спускаемым аппаратом и передает все данные ему. Спускаемый аппарат поднимается на орбиту и передает информацию орбитальному зонду который возвращает ее на Кербин.
В результате вышло 2 носителя:
1) для спускаемого аппарата
2) содержит трамвай из орбитального зонда и ровера
 Спускаемый аппарат хотелось сделать как-то нестандартно. Попробовал тороидальные баки. Оказалось что это
Спускаемый аппарат хотелось сделать как-то нестандартно. Попробовал тороидальные баки. Оказалось что этодовольно компактно и симпатично. Получилась этакая "ракета-пружинка". :)

 Ровер клипаный и некоторые вещи из него наверное можно выбросить. Это модернизация из предыдущих миссий к Дюне. В качестве источника энергии солнечные батареи не подошли. Мощности не хватает.
Ровер клипаный и некоторые вещи из него наверное можно выбросить. Это модернизация из предыдущих миссий к Дюне. В качестве источника энергии солнечные батареи не подошли. Мощности не хватает.
 Орбитальный зонд очень простой тут особенно и рассказывать не о чем.
Орбитальный зонд очень простой тут особенно и рассказывать не о чем.Сама миссия.
1) На орбиту кербина последовательно отправляются спускаемый аппарат и трамвай.
2) С орбиты Кербира оба отправляются к Еве. Подлетные траектории нужно выбрать так чтобы аппараты прибыли с разницей во времени и посадкой на сушу.
3) На траектории к Еве трамвай расцепляется и производится коррекция траектории орбитального зонда с целями:
- орбитальный зонд должен иметь перицентр Евы около 40 км для правильного аэроторможения
- орбитальный зонд должен пибыть к Еве с разницей в несколько часов с ровером. Иначе ими трудно совместно управлять
4) Перед посадкой спускаемого аппарата надо не забыть свернуть солнечные панели.
5) Траектория посадки спускаемого аппарата должна быть довольно крутая иначе может сгореть. Аэротормоза используются для точного наведения при посадке. +/- чтобы не плюхнуться в озерцо. Надуваемый тормозной щит используется как парашют. :) Поэтому при посадке он выглядит как забавный "гриб". :) Раскрытие основных парашютов происходит одновременно с отстрелом тормозного щита на небольшой высоте (2-3 км). Отдельной регулировки потребо посадочные опоры иначе под весом в 94т они ломаются.
6) После посадки спускаемый аппарат разворачивает солнечные панели и ждет прибытия ровера в гибернации.
7) Расчитать точно параметры аэроторможения орбитального зонда довольно сложно. Пришлось несколько раз переигрывать. Может кто поделится опытом как это делать? После окончания активной фазы аэроторможения не забыть отделить тепловой щит! :)
8) Посадка ровера также осуществляется по довольно крутой траектории. Здесь тепловой щит используется по прямому назначению. РСУ необходимо для стабилизации при посадке. Двигатели РСУ выбраны мощные и вынесены на рычагах для увеличения стабилизирующего момента.
9) При посадне не забыть проворно собрать научную информацию с орбиты и верхних слоев атмосферы Евы. Все необходимо записать в модуль хранения.
9) Сброс тормозного щита осуществляется после раскрытия парашютов.
10) При посадке аппарат нужно повернуть так, чтобы ровер после посадки был наклонен колесами по склону
11) После посадки необходимо переключить управление на ровер включить САС и выбрать ориентацию (по-моему) "радиально наружу". После этого можно отстрелить модуль управления и посадочные опоры. Ровер должен брякнуться на колеса. Включить тормоза. Ровер готов ехать к спускаемому аппарату.
12) Я проехал по Еве на этом ровере примерно 1/4 экватора. Посетил 4 биома - пики, низменности, возвышенности, средиземье. На пики было очень трудно забираться. Энергии нехватало.
13) После стыковки со спускаемым аппаратом у ровера разлись колеса и сейчас он из себя представляет унылое зрелище, но тем не менее он полностю выполнил свою функцию.
 14) При взлете спускаемого аппарата от него отстреливается все лишнее. Тем не менее взлет довольно сложная процедура.
14) При взлете спускаемого аппарата от него отстреливается все лишнее. Тем не менее взлет довольно сложная процедура.15) Стыковка на орбите спускаемого аппарата и орбитального зонда очень простая. В виду того что оба аппарата управляются двигатели ориентации не нужны.
16) После стыковки модуль хранения остается на орбитальном зонде, а остатки спускаемого аппарата отстреливаются.
16) Ждем на орбите окно для возвращения на Кербин и стартуем домой.
-
 Grigory72
Grigory72 - 5 дек 2018 в 12:54
- 6 395
- 20

Зонд для изучения Евы
31 дек 2017 в 06:49, Сохранения
Pelican Mk1p
6 июн 2017 в 13:02, СохраненияHello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии

ОБНОВЛЕНИЕ! Параллельный импорт EVE Raymarched Volumetrics версия "Иду на грозу" (июль2024)
доброго времени суток там случайно новых версий за полгода не вышло?
Kastronomicon, маяк Кербина
При всём уважении, в статье нет матана. Есть только элементарная математика.

ShineFix - мод для починки всех отражений и флагов в игре
В новой версии исправлено - теперь ресток тоже полностью поддерживается)
ShineFix - мод для починки всех отражений и флагов в игре
Shaddy и Shabby это два разных мода, ссылки в посте ведут на репозитории авторов, что априори самое
ShineFix - мод для починки всех отражений и флагов в игре
Я добавил в подпись актуальную версию, она будет обновляться автоматически, как и ссылка на неё)

Все комментарии..
Полный список последних комментариев
Последние сообщения с форума

Все сообщения..
Полный список последних сообщений
Loading...
Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt