Как строить VTOL самолёт.
-
ai_Alex, тяга только от двигателей вертикального взлёта должна быть направлена строго в ЦМ.
GitHub
Неактивен на сайте. Связаться со мной можно через Discord (Kerbiter#3128) и Telegram (@Kerbiter).19 января 2015 - 18:02 / #21 -
Подойдёт не всем (не сток), но Throttle Controlled Avionics, можно через СКАН. Летать будут даже топоры (главное - 3 двигателя (плоскость может через 3 точки) и подальше их от центра масс).
Никаких деталей. Только чтобы на крафте было больше 1 двигла (иначе смысл теряется)
[ SmallTweaks ] [ WaterTanks ] [ 3D Primitives ] [ Kerbin 2.5x (тесты) ] [ KSP Rebalance (в разработке) ]
6 июля 2015 - 14:42 / #22 -
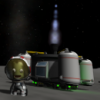
Мои для наглядности:
[attachment=18947]
[attachment=18948]
{insert-140109}6 июля 2015 - 15:21 / #23 -
ai_Alex, Способ намбер ван - добавь побольше SASов, можно даже RCS - для начинающих. Способ намбер ту - поставить Throttle Controled Avionics Continued ( мсье Гуголь поможет) и забыть - для обычного юзера. Способ намбер три - разнести движки вертикальной и горизонтальной тяги в разные ступени, назначить на них свои группы, поставить RCS Build Aid и тщательно всё подгонять, центровать - для продвинутых пользователей. Способ намбер фор - Курить всё, что написал перец по имени Cupcake на оффоруме, посмотреть попутно его видео, купить джой, настроить научиться строитьскачать подходящие крафты, научиться рулить ими с помощью джойстика - уровень БДСМ.
А ТЫ отключил AdBlock на этом сайте?
7 июля 2015 - 02:02 / #24 -
Slevin_UA, присоединюсь к наркомании некромантов. Для меня есть два способа (причем второй так и не опробовал еще, руки не доходят):
1-ый практически идентичен п.3 тов.Слевина. Проектируешь аппарат, устанавливаешь основные массы, двигатели горизонтального полета, крылья, ЦМ точно в центр крафта (в продольной и горизонтальной плоскостях), определяешь место установки движков вертикального взлета (в зависимости от массы движков ставишь минимальное кол-во с небольшим запасом по тяге - т.е. чтоб мог взлетать вертикально на 75-90 процентах тяги. КСП очень толерантен к небольшим ошибкам балансировки, поэтому одно и двух двигательный схемы (ну и более-двигательные, если на одной линии) вполне жизнеспособны. Конечно, как известно три точки опоры, разнесенные в одной плоскости, позволяют поставить ровно что угодно. Устанавливаешь движки вертикального взлета. Лучше всего направлять их вертикально вниз - любое отклонение придется компенсировать - что есть потеря тяги и эффективности. Вектр тяги от них (дабы в отображение "розового" шарика не вмешивались горизонтальные движки - снимите их) расположить точно вертикально, а сам центр тяги точно на одной вертикальной линии с ЦМ. Все тщательно балансируется, чтобы хорошо летало без всяких некошерных САС, После этого опционально, но желательно - Throttle Controled Avionics (еще раз, ключевое слово - после. Можно и не ставить, но ни один современный VTOL без ассиста не летает. Не потому, что не может или криво спроектирован, а потому, что так точнее управление и безопаснее полет) устанавливаем, берем летный джойстик (также опционально - нужно добиться, чтобы и с клавиатуры хорошо управлялось, но джойстик даст ни с чем не сравимое чувство контроля) и наслаждаемся.
2-ой отличается только тем, что перед проектированием устанавливается Infernal robotics и двигатели горизонтального полета выполняют функцию вертикальных. Конструирование в той же последовательности.
7 июля 2015 - 02:27 / #25 -
А никто не пробовал чисто из стоковых частей строить гигантов-ВТОЛ-ССТО, способных вертикально иили с разбегом взлетать, планировать в атмосфере, выходить на орбиту, и после всего этого выполнять роль орбитальной станции или планетарнойлунной базы, с возможностью посадки и самостоятельного взлета с планеты или луны (разумеется, с дозаправками, но интересны сами характеристики и вообще возможность постойки подобного аппарата)?
... В тюрьме столько не сидят, сколько мы в интернете...
... Выход есть всегда. А если его нет - откройте аварийный люк...26 июля 2015 - 09:34 / #26 -
Работаю над СВВП при помощи robotics, столкнулся с проблемой жидких сочленений. Ужасная болтанка подвижных мотогондол (а они даже не топливные, использую компрессор трд, то есть не очень тяжелые) при горизонтальном полете. Как бороться с этим, не подскажете? В смысле, сделать соединения более жесткими :)
3 августа 2015 - 16:43 / #27 -
Харамамбурум писал:А никто не пробовал чисто из стоковых частей строить гигантов-ВТОЛ-ССТО, способных вертикально иили с разбегом взлетать, планировать в атмосфере, выходить на орбиту, и после всего этого выполнять роль орбитальной станции или планетарнойлунной базы, с возможностью посадки и самостоятельного взлета с планеты или луны (разумеется, с дозаправками, но интересны сами характеристики и вообще возможность постойки подобного аппарата)?
Непонятно, что подразумевается под ролью орбитальной станции, а вообще раздел по космолетам вроде есть
[url=/forum/samolety/topic-128-page-388.html][/url]
Насчет гигантов, у меня 240 тонн взлетает, планирует в атмосфере дюны и вертикально садиться на нее.
Сильно крупнее аппарат собрать сложно из за слабого скрепления между собой блоков mk3 (космолет начинает разваливаться в атмосфере при перегрузках), и тормозах компа при работе более 20 двигателей.
3 августа 2015 - 17:02 / #28 -
3 августа 2015 - 18:03 / #29
-
r0n1, и скрины дам, и крафт выложу. На сверхзвуке все разваливается, а в космос иначе никак. Признаюсь, хочу модернизировать свою блоху, но меня ужасно пугают перспективы, если mk2 ломается, что будет и без того с тяжелой в управлении блохой?
Цели, взлетать вертикально, переходить в горизонтальный полет, а дальше все по стандартной схеме. Главная задача вертикальная посадка на безатмосферные планеты и спутники, если решу вопрос болтанки - прикручу ЯРД. В общем, это концепт.
[attachment=19585]
[attachment=19586]
[attachment=19587]
4 августа 2015 - 08:00 / #30 -
Для VTOL все так же, только центр тяжести должен совпадать с центром тяги.Можно еще IR прикрутить, да и kOS можно, судя по наплыву гайдов по нему.Мне бы такой наплыв года 2-3 назад, когда я залип на кос.ИР тут для разворота двигателей в горизонт.

Гость точно не крал колбасу из моего холодильника.13 ноября 2017 - 01:09 / #31 -
JetFly писал:Два чая этому некропостеру. Да, чай двухлетней давности.
Для VTOL все так же, только центр тяжести должен совпадать с центром тяги.Можно еще IR прикрутить, да и kOS можно, судя по наплыву гайдов по нему.Мне бы такой наплыв года 2-3 назад, когда я залип на кос.ИР тут для разворота двигателей в горизонт.
GitHub
Неактивен на сайте. Связаться со мной можно через Discord (Kerbiter#3128) и Telegram (@Kerbiter).13 ноября 2017 - 01:23 / #32 -
не сложно быть некропостером на этом форуме...
Вражеский шпиён...
13 ноября 2017 - 02:13 / #33 -
Чел по делу написал в соответствующую тему. За некропост несчитово )
13 ноября 2017 - 19:46 / #34 -
Да че не так то?Пост то не очень давнешний
UPD:"Не очень"...Всего-то 4 года ему...
Как я до сих пор играю в это, когда моему компу лет так 12?
Пусть и в 1.1 но не суть.
Гость точно не крал колбасу из моего холодильника.14 ноября 2017 - 16:47 / #35 -
JetFly писал:Переходи на версию 1.3.1. Она лучше работает (оптимизирована) чем начальные 1.х.
Как я до сих пор играю в это, когда моему компу лет так 12?Пусть и в 1.1 но не суть.
 15 ноября 2017 - 00:34 / #36
15 ноября 2017 - 00:34 / #36







Статистика форума, пользователей онлайн: 0 (за последние 10 минут)
Администраторы | Модераторы | Хорошие люди | Посетители | Новичок
Hello there!
Дорогой Гость, чат доступен только для зарегистрированных пользователей.
Последние комментарии



Последние сообщения с форума



Нашли ошибку?
Вы можете сообщить об этом администрации.
Выделив текст нажмите Ctrl+Alt